the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 12 Nov 2025
| 12 Nov 2025
Review article: Plant-inspired robotics: a comprehensive review based on on-/off-plant behaviours and future perspectives
Chenting Zhou
Yutong Wu
Shuzhi Wang
Ruihan Liu
Shunmei Wang
Yongjing Hu
Junyi Li
Guangbo Hao
Plants have evolved diverse strategies to survive and thrive in competitive natural environments. Their behaviours and mechanisms provide a rich source of inspiration for the design of innovative robots and have attracted growing attention from the robotics community over the past decades. Corresponding to the typical plant life cycle, this review introduces a new framework that categorizes plant-inspired robots into two main groups, i.e. robots inspired by on-plant and off-plant behaviours. Theoretically, all plant-inspired robots can be covered in this categorization framework. On-plant behaviours refer to movements exhibited by plants as monolithic living systems, and four categories of robots inspired by corresponding on-plant behaviours, including growth, gripping, trapping, and other specialized behaviours, are discussed. Off-plant behaviours involve movements of both parent plants and detached parts for seed dispersal. Robots inspired by three types of off-plant behaviours (wind dispersal, ballistic dispersal, and humidity-driven self-locomotion of seeds) are reviewed in detail. Furthermore, two conceptual research directions are proposed for the long-term development of the plant-inspired robots: (1) natural plant optimization re-inspired by robotics based on synthetic biology and (2) the development of exoplanet robots inspired by plant survival strategies. Due to their unique advantages, such as structural compliance, low cost, eco-friendliness, environmental adaptability, and responsiveness to stimuli, plant-inspired robots show application values in agriculture, biomedicine, environmental monitoring, and beyond. More advanced plant-inspired robots are expected to emerge in the upcoming future along with expanding knowledge of plant biology and growing research interest, which enables this review to be continuously refined and expanded.
- Article
(3945 KB) - Full-text XML
- BibTeX
- EndNote




Plants, categorized within the kingdom Plantae among eukaryotes (Cavalier-Smith, 1998), occupy about 80 % of the biomass across all taxa on Earth (Bar-On et al., 2018). They feature the ability to transfer solar energy into chemical energy stored in carbohydrates through photosynthesis, adopting only water and carbon dioxide as substrates and releasing oxygens at the same time in this procedure. Plants thus serve as the material and energetic foundation of the entire terrestrial ecosystem on the global level (Chapin et al., 2011). In order to survive and thrive in the extremely complex, unpredictably dangerous, ever-changing, and highly competitive natural environments, plants have developed diverse strategies over approximately 460 million years of evolution (Koch et al., 2009) to effectively interact with and adapt to the ambient environments. They exhibit optimized structural architectures which are constructed with just four basic building blocks: cellulose, hemicellulose, lignin, and pectin (Gibson, 2012).
At the macroscopic level, hierarchically arranged lignified tissues (e.g. xylem) enable plants to achieve enhanced mechanical performance (Gao et al., 2022; Kretschmann, 2010) while efficiently acquiring resources such as light and water. Trees are representative examples that withstand both substantial static loads (e.g. branch weight) and significant dynamic stresses (e.g. wind) by developing adaptive growth strategies, such as the formation of reaction wood. These macroscopic structures provide valuable inspiration for structural design in both engineering (Niklas, 1992) and scientific research (Dixit and Stefañska, 2023; Ma et al., 2025; Bastola et al., 2021). At the microscopic level, intricate microstructures and surface patterns endow certain plant surfaces with functional properties (Wijerathne et al., 2025; Koch et al., 2009), such as superhydrophobicity (Yoo et al., 2022; Feng et al., 2002), super-wettability (Wen et al., 2015), reversible attachment (Fiorello et al., 2021; Fiorello et al., 2020), and directional liquid transport (Chen et al., 2016; Chen et al., 2018; Meng et al., 2014). These features contribute to plant survival and strengthen their ecological competitiveness. Moreover, such microstructures have inspired the development of smart surfaces with tailored functionalities to achieve improved performance across diverse application domains (Li et al., 2023b; Pimpale et al., 2025), including anti-icing technologies for aeroplanes (Lv et al., 2014), self-cleaning medical devices (Chen et al., 2025a), and water-harvesting strategies in arid regions (Pan et al., 2016; Jalali et al., 2022), among others.
In addition, plants typically exhibit topological (Godin and Caraglio, 1998; Mandelbrot, 1983) and modular (Xu et al., 2006) architectures, whereby growth is realized through the repetition of basic modules across multiple hierarchical levels and spatial gradients. These characteristics underpin plants' remarkable regenerative capacity (Birnbaum and Alvarado, 2008), enabling them to recover functional integrity after partial damage (Fenner, 2000). This regenerative ability constitutes an adaptive survival strategy against environmental disturbances. The structural topology and modularity of plants have also attracted broad interest across diverse disciplines, including biology, architecture, geometry, mathematics, computer science, and art. Notably, plants communicate both above ground (Shen et al., 2023) and below ground (Guerrieri and Rasmann, 2024) via chemical and physical signals (Bolnick et al., 2018), either directly with neighbouring plants or indirectly through symbionts such as mycorrhiza, endophytic fungi (Shen et al., 2023), and dodder (Sharifi and Ryu, 2021; Ochola et al., 2021), to exchange information on environmental threats and resource availability.
Anchored to the ground or attached to hosts, plants cannot relocate or escape from external threats. Their behaviours are generally slow, subtle, and highly localized, making them distinct from animals, which can move freely and respond rapidly. Therefore, animals have received greater attention than plants in robotics research (Hedley, 2025; Chen et al., 2025b). Nevertheless, plants have evolved diverse survival strategies, ranging from slow to rapid and even furious motions (Forterre, 2013), across different life stages in response to environmental changes and stimuli. Beyond the generally slow growth of plants, some species exhibit rapid actions for purposes such as trapping prey (Forterre et al., 2005; Sachse et al., 2020; Miranda et al., 2021), pollination (Findlay and Findlay, 1975; Zhang et al., 2022a), seed dispersal (Kayahan, 2024; Hayashi et al., 2009), and self-protection (Ahmad et al., 2012; Volkov et al., 2010). These motions, whether slow or rapid, primarily result from water absorption and transport (Mazzolai, 2016). The diverse survival strategies, adaptive behaviours, and corresponding structures of plants provide a rich source of inspiration for the development of advanced robots.
In recent years, increasing attention has been paid to plants in the field of robotics (Xu et al., 2021; Rabaux and Jérôme, 2025; Chen et al., 2025b). Compared with animal-inspired robots, plant-inspired robots exhibit unique characteristics such as growth-driven development (Hawkes et al., 2017; Del Dottore et al., 2024; Mao et al., 2024), environmental adaptability (Luo et al., 2023; Fiorello et al., 2024), and morphological diversity (Ren et al., 2021; Jeong et al., 2024). These features confer functional advantages, including green energy harvesting (Yan et al., 2022), high flexibility in confined spaces (Hawkes et al., 2017; Del Dottore et al., 2024; Mao et al., 2024), low-cost mass deployment (Luo et al., 2023; Fiorello et al., 2024), biodegradability (Luo et al., 2023; Fiorello et al., 2024), and physical intelligence (Feng et al., 2025; Speck et al., 2023; Segundo-Ortin and Calvo, 2022). These advantages make plant-inspired robots particularly suitable for applications in open and wild natural environments where direct interaction with the environment is required. Moreover, by transmitting force, motion, and energy through elastic deformations of flexural parts, both whole plants and their detached parts function as compliant mechanisms (Howell, 2012; Liang et al., 2021). Due to the unique advantages, including flexibility, monolithic structures, low or no assembling complexity, reduced mass, and low cost, compliant mechanisms are ideal structural solutions for replicating plant behaviours in both science and engineering fields (Poppinga et al., 2020, 2016).
Plant-inspired robots have been reviewed and summarized in the literature. However, some reviews about these multidisciplinary studies focus mainly on the technical (Ren et al., 2021; Xu et al., 2021) or material (Chen et al., 2023b) perspectives, while others address either a limited number of representative examples (Speck et al., 2023; Speck et al., 2022) or specific organisms of plants (Chen et al., 2025b) in a fragmented manner. A systemic review of plant-inspired robots from the perspective of typical plant life cycles is still missing. In addition, the rapidly increasing number of plant-inspired robots reported in recent years calls for such a systematic review.
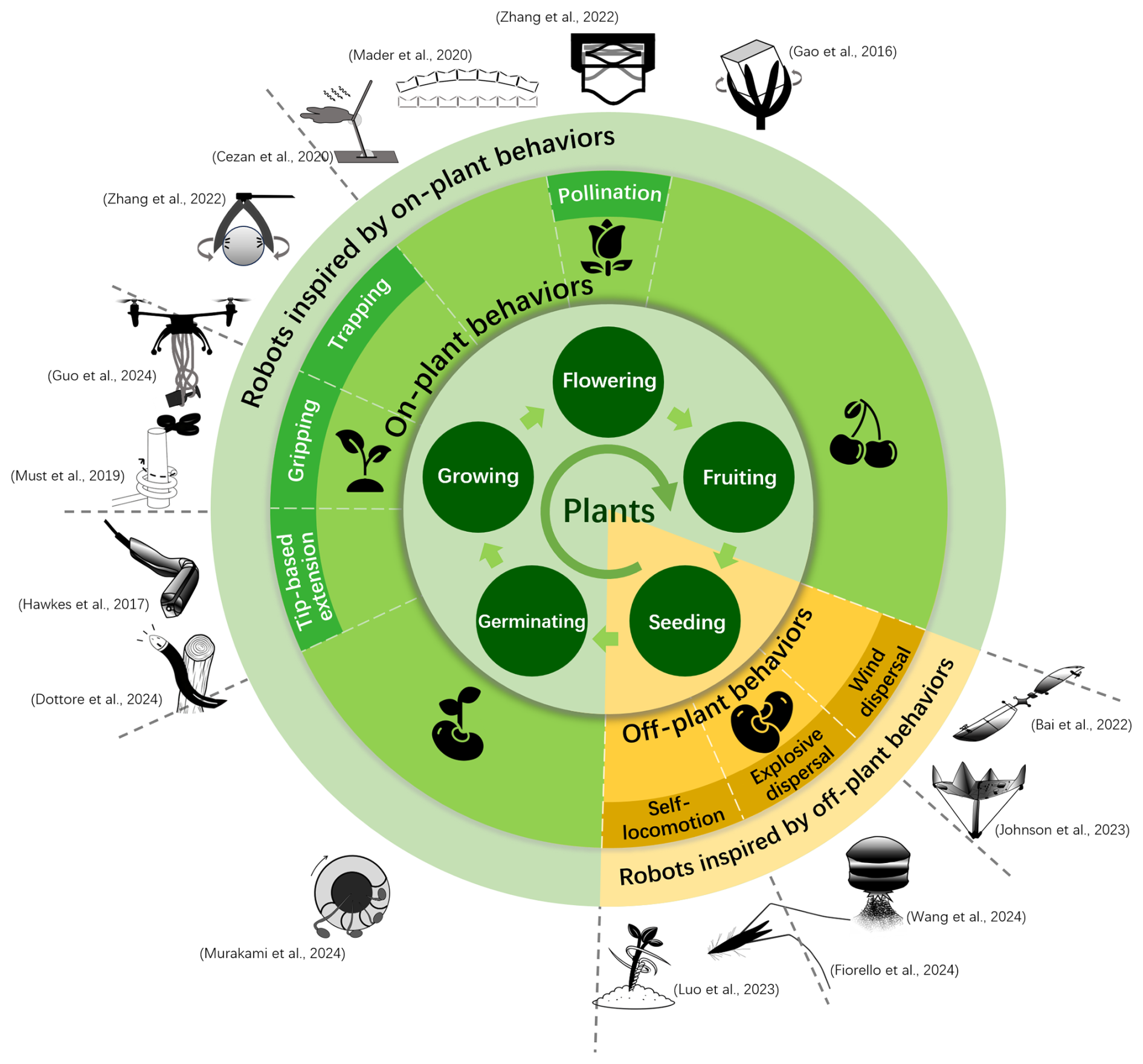
Figure 1Life cycle of plants and categorization of plant-inspired robots according to on- and off-plant behaviours.
In this review, we analyse and categorize plant-inspired robots reported in the literature into two branches, robots inspired by on-plant behaviours and robots inspired by off-plant behaviours, based on the typical life cycle of plants (Walbot and Evans, 2003). On- and off-plant behaviours are defined as follows:
-
On-plant behaviours refer to motions performed by intact plants as monolithic living systems, typically occurring during stages such as germination, growth, flowering, and fruiting.
-
Off-plant behaviours encompass the motions of seeds after detachment, along with seed-dispersal-related motions. These behaviours occur only in the seeding stage.
The essence of all these plant behaviours lies in their strategic adaptions to environmental conditions, enabled by specific structural morphologies that support survival and reproduction. In robotics research, such adaptability of plants has been successfully replicated to develop diverse plant-inspired robots exhibiting functions such as tip-based extension, object gripping, flying, shooting, and self-locomotion. This remarkable environmental adaptability of plants will also inspire the design and development of new robots capable of dynamically interacting with the physical world. The overall plant life cycle and the corresponding categorization of plant-inspired robots are illustrated in Fig. 1. In principle, all plant-inspired robots can be encompassed within this classification framework.
The remainder of this review is organized as follows. Section 2 introduces plant-inspired robots developed that mimic on-plant behaviours, structured into four sub-sections. Robots inspired by the off-plant behaviours are analysed and presented in Sect. 3. Section 4 outlines two conceptual development directions of plant-inspired robots in the long-term future. In the last section, conclusions are drawn.
A plant generally functions as a monolithic mechanism throughout most of its lifetime until the seeding stage, as indicated in Fig. 1. Its primary functions are achieved either through growth, which is driven by cell proliferation and osmotic actuation (Forterre, 2013; Cosgrove, 2005), or through elastic deformations of flexural structures. On-plant behaviours refer to movements and responses exhibited by each plant as a whole organism. Typical examples include growth, gripping, and trapping behaviours, as well as other motion strategies. A detailed discussion on these behaviours and their corresponding plant-inspired robots is provided in the following sub-sections, and they are summarized in the summary sub-section.
2.1 Robots inspired by growth behaviours
All plants grow in order to secure sufficient environmental space and survival resources such as light, water, nutrients, and pollinators. Typically, plant roots and vines elongate exclusively at their tips, where new materials are added without displacing the previously formed body. This tip-based growth strategy benefits plants by minimizing the energy consumption during body extension in a complex natural environment due to the dramatically reduced friction and inertial resistance (Bianchi et al., 2023; Blumenschein et al., 2020). It provides the design inspiration of continuous vine- and root-like robots capable of navigating constrained and unstructured environments for detection and operation (Blumenschein et al., 2020; Coad et al., 2020), a task that remains challenging for many other robotic systems. The tip-based growth of plant roots and vines, along with its application inspiration in aeroengine maintenance, is schematically illustrated in Fig. 2.
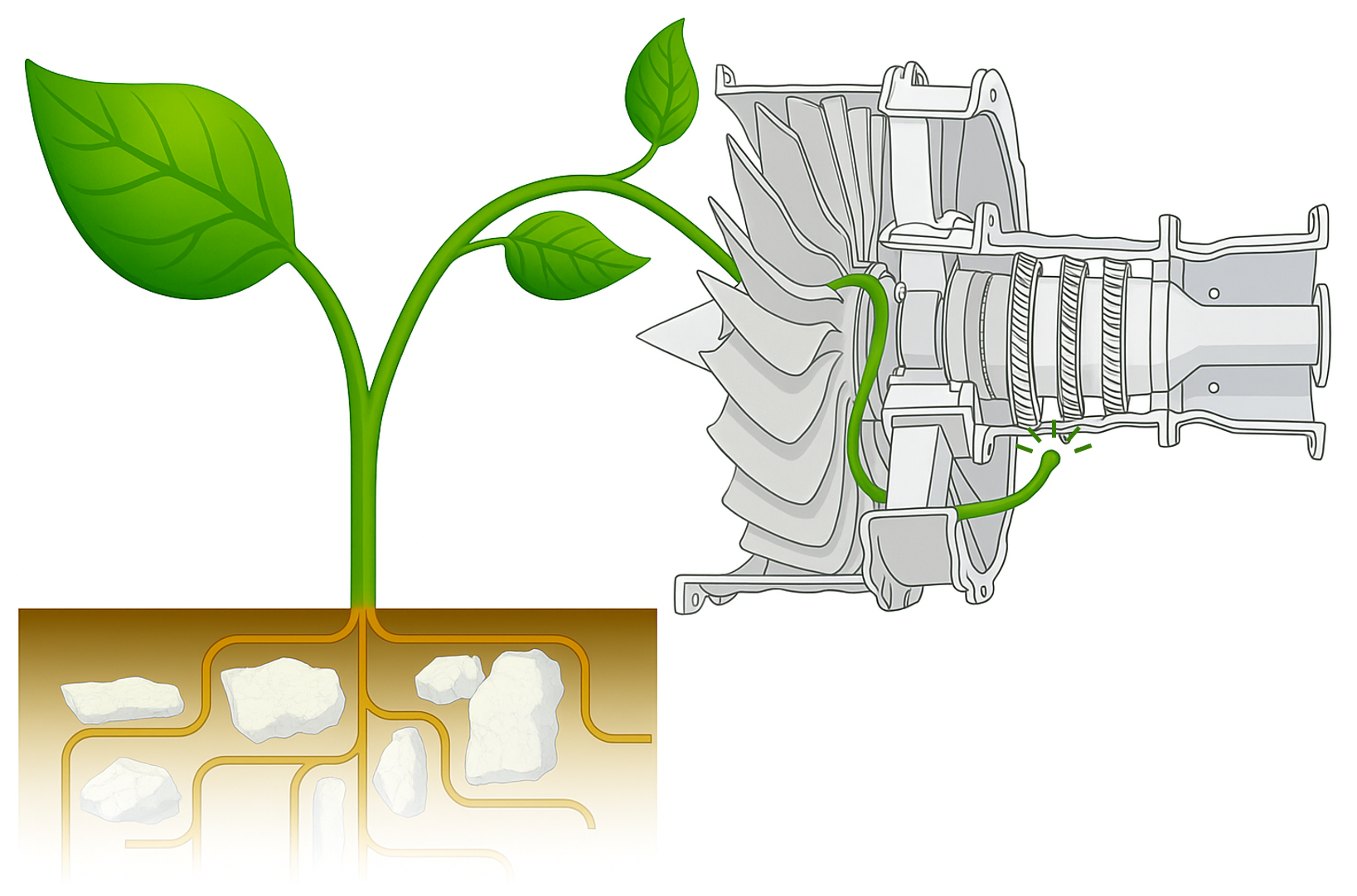
Figure 2The schematic figure of tip-based growth of plant roots and vines and application inspirations in aeroengine maintenance.
Plants achieve tip-based extension by polymerizing cell wall components, primarily cellulose, at the growing tip to build solid structures (Gu and Nielsen, 2013; Hausladen et al., 2022). Inspired by this principle, vine- and root-like robots extend their bodies by continuously adding materials at the tips, using various approaches. A representative example is the everting vine robot, which achieves tip-based extension through pressure-driven eversion of flexible, thin-wall vessels (Blumenschein et al., 2020). Its typical structure consists of a pressurized hollow support body with a thin skin that progressively turns inside-out under the pressure actuation, subsequently building new body material at the tip. The actuation pressure can be pneumatic (Li et al., 2021b; Hawkes et al., 2017) or hydraulic (Luong et al., 2019), depending on the application scenarios. Similarly to natural vines and roots of plants, these robots typically represent flexibility in two folds: (1) compliance of the structural materials and (2) functional adaptability responding to complex environmental conditions.
Navigation performance of the everting vine robot in confined and tortuous environments relies on accurate steering control of the tip over long distances. This is achieved by bending the cylindrical body toward the desired direction through asymmetric tip elongation (Hawkes et al., 2017). Reported structural solutions for steering include electromagnets (Li et al., 2021b), Velcro straps (Bianchi et al., 2023), latches (Hawkes et al., 2017), and pneumatic artificial muscles (Greer et al., 2019; Greer et al., 2018; Kübler et al., 2024) and tendons (Berthet-Rayne et al., 2021; Naclerio et al., 2021; Do et al., 2020). Similarly to the environmental adaptability of plants, pressure-actuated everting vine robots can navigate in air (Coad et al., 2020), water (Luong et al., 2019), or soil (Naclerio et al., 2021). In subterranean conditions, however, large drag forces pose one of the major challenges for everting vine robots. Instead of adopting circumnutation strategies like plant roots (Del Dottore et al., 2018; Wooten and Walker, 2018), Naclerio et al. proposed a novel solution of tip-based airflow method to reduce drag, based on the physics of granular intrusion (Naclerio et al., 2021).
Addictive manufacturing technology provides an alternative solution for tip-based extension. 3D printers, based on common techniques such as photopolymerization (Hausladen et al., 2022) and fused deposition modelling (FDM) (Del Dottore et al., 2024; Sadeghi et al., 2017), can be embedded at the robot tip to facilitate continuous tip-based growth. For instance, Hausladen et al. (2022) and Kayser et al. (2018) utilized UV-curing resin for photopolymerization in their studies, while Sadeghi et al. (2017) and Dottore et al. (2024) realized tip-based extension using polylactic acid (PLA) filament as structural material for the FDM method. Moreover, the introduction of fibre-reinforced composites (FRCs) into tip-extension robots has further enhanced their mechanical properties (Kayser et al., 2018). Directional steering in 3D-printed tip-extension robots is achieved by creating an asymmetry along the tubular axis through differential material deposition. However, due to the integration of electronic components within the printing module, waterproofing must be carefully addressed before deploying such robots underwater, in contrast to prior demonstrations in air (Del Dottore et al., 2024; Hausladen et al., 2022; Kayser et al., 2018) and in soil (Sadeghi et al., 2017).
In addition, vine- and root-like robots with growth capability can also be realized through a tunable stiffness mechanism. Mao et al. developed a millimetre-scale tip-extension robot that achieved tip-based elongation by alternately adjusting the stiffness of two mutually contained structural pipes under programmable magnetic fields (Mao et al., 2024). In the tip-extension robotic arm developed by Yan et al. (2019), tip-based growth was achieved by well-designed purely mechanical mechanisms which converted fluidized segment chain into a rigid structure. The bending direction of the robot was controlled via a steering gear. Tunable stiffness endowed such robots with intrinsic retractability, a feature absent in plants and difficult to achieve in tip-extension robots based on 3D printing technologies.
Plants can detect and respond to environmental stimulus. Similarly, sensing capability is fundamental for tip-extension robots to navigate complex environments and successfully accomplish tasks. Various sensors are integrated into these robots to provide information for steering control, with cameras frequently used for real-time visual imaging (Coad et al., 2020; Maur et al., 2021). Assisted by sensors and steering control algorithm (El-Hussieny et al., 2020; Greer et al., 2020), tip-extension robots can detect and respond to external stimulus such as light, gravity, humidity, temperature, and mechanical loads (Sadeghi et al., 2016; Del Dottore et al., 2024), thereby enabling tropic-like movements. In addition to commercial sensors, customized sensing solutions have been developed for better integration with vine- and root-like robots. For example, gravity and acceleration perception can be achieved using liquid metal circuits (Chen et al., 2024), which allow self-regulation of soft robots without traditional electronics. Furthermore, the ability to sense interactions with surrounding objects is essential for root-/vine-inspired robots. Lucarotti et al. demonstrated a method to distinguish bending shapes and detect interaction forces in a soft robot by applying two capacitive tactile elements (Lucarotti et al., 2015).
Tip-extension robots inspired by the growth behaviours of plant vines and roots are particularly suitable for navigating and exploring constrained, tortuous, and cluttered environments. Reported applications include transluminal surgery (Mao et al., 2024; Berthet-Rayne et al., 2021), search and rescue (Maur et al., 2021), environmental monitoring (Sadeghi et al., 2016; Naclerio et al., 2021), and space exploration (Naclerio et al., 2021). Tip-extension robots based on 3D-printing technologies demonstrate enhanced mechanical strength and durability and can further enable on-site autonomous construction of complex structures (Kayser et al., 2018; Del Dottore et al., 2024).
2.2 Robots inspired by gripping behaviours
Tendrils act as powerful tools for some climbing plants (Darwin, 1875a), such as Cucumis sativus (cucumber) (Gerbode et al., 2012), Mandevilla cf. splendens (Naselli et al., 2024), Passiflora discophora (Klimm et al., 2024), and Dioscorea bulbifera (Cheng et al., 2021), to anchor themselves and support their weight while they grow in the wild and unstructured environments (Meder et al., 2022). Once the tendrils attach to an object, they quickly curl round and form a spring-like structure with two opposite-handed helices (Gerbode et al., 2012; Goriely and Tabor, 1998), dragging up the stems. For parasitic climbing plants, such as Cuscuta (Hegenauer et al., 2016; Kaiser et al., 2015), they coil around the host plants using slender twining stems to secure attachment, occupy the living space, and absorb nutrients via haustoria. In tendrils, the fibre ribbon is composed of specialized long cells with cell-wall lignification capability, and it is typically in a bi-layer structure. As one layer of the ribbon shrinks relative to the other via cell-wall lignification along the entire length of the tendril, the tendril coils (Gerbode et al., 2012). Although tendrils share the same growth behaviours as introduced in Sect. 2.1, we particularly focus on their gripping behaviours in the form of bending and spiral twisting motions in this section. Plant tendrils and their engineering inspirations with demonstrative application cases are schematically presented in Fig. 3.
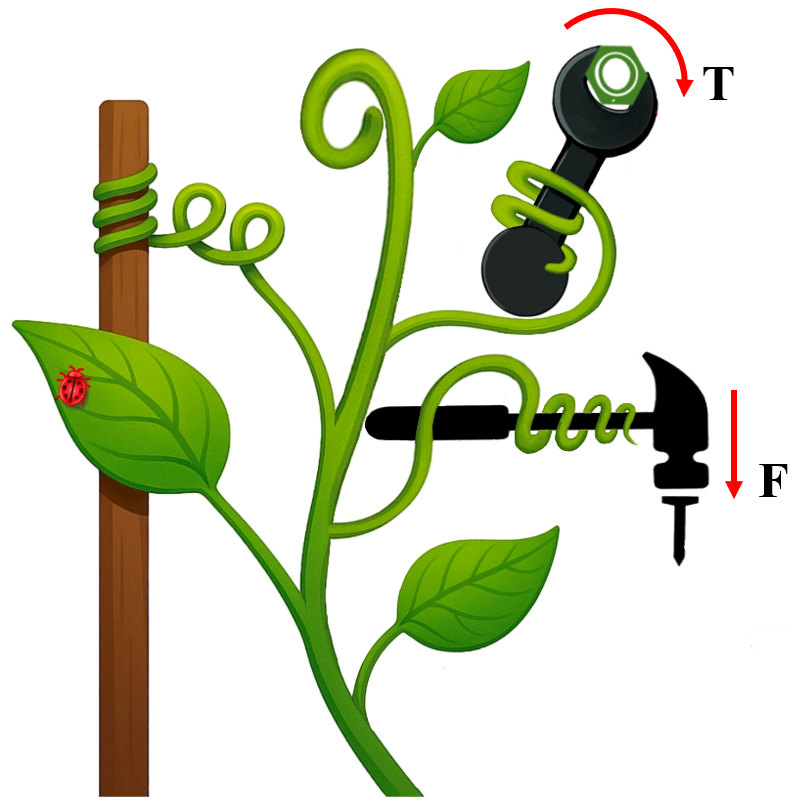
Figure 3The schematic figure of plant tendrils and their engineering inspirations with demonstrative application cases (applying torque and force).
Inspired by the coiling motions of plant tendrils for gripping, numerous tendril-like robots have been developed. The characteristic bi-layer fibre ribbon of natural tendrils offers a simple yet effective structural method to achieve coiling, and most tendril-like robots reported in the literature adopt this bi-layer architecture for actuation. Various shape-morphing modes (e.g. bending, coiling, and spring twisting) can be pre-programmed into bi-layer composites during design and fabrication (Cheng et al., 2021; Farhan et al., 2023; Qing et al., 2024) and are realized through stress differentials and anisotropic extrusion between layers under external stimuli. The available actuation principles vary a great deal in literature, and they include liquid–gas-phase transition (Guo et al., 2024), solid–liquid-phase transition (Meder et al., 2022), thermal expansion (Farhan et al., 2023), moisture-induced swelling (Cheng et al., 2021), hydraulic (Qing et al., 2024) and pneumatic pressure (Knospler et al., 2024), ion electrosorption (Must et al., 2019), magnetic stimulation (Li et al., 2025), and photo-responsive deformation (Wang et al., 2016; Li et al., 2025). These designs are generally soft and monolithic. Alternatively, tendril-like robots can be constructed with identical modular units connected in series to coil and grasp objects (Naselli et al., 2024; Yang et al., 2020). Deformations of individual modules collectively contribute to the final system-level morphology.
A single plant tendril is able to realize multiple deformation modes. Pursuing this multi-shape morphing capability, Li et al. developed a tendril-like robot which exhibited reversible bending or spiraling motions under an electric/magnetic/light coupling actuation (Li et al., 2025). Taking light with different wavelength bands as stimuli, Wang et al. created a soft tendril-like actuator capable of reversible bending or chiral twisting (Wang et al., 2016). These designs dramatically increase the dexterity of artificial tendrils in complex environments.
In addition to diverse deformation modes, the stiffness of natural tendrils increases dramatically when it turns from fresh to senescent due to the lignification of cell walls, resulting in greater strength and enhanced attachment (Klimm et al., 2024). To mimic this stiffening phenomenon, Meder et al. introduced a solid–liquid-phase transition into their bi-layered tendril-like soft robot, creating stress differentials between the two structural layers (Meder et al., 2022). Driven by electric heating, the thermoplastic core melted, which induced the robot to coil. Upon cooling, the core re-solidified, and the robot stiffened to achieve tighter gripping. Similarly, Guo et al. employed a heat-powered liquid–gas-phase transition to simultaneously achieve self-adaptive coiling and stable grasping of objects in uncrewed aerial vehicle (UAV) manipulation (Guo et al., 2024). Qing et al. utilized fluidic pressure in a bi-layered actuator to achieve rapid coiling and shape locking (Qing et al., 2024). Notably, the stiffness-hardening feature in some artificial tendrils is reversible (Qing et al., 2024; Guo et al., 2024), thereby improving operational flexibility and efficiency, whereas lignification-induced stiffening in nature is irreversible.
Plant tendrils are highly sensitive to touch and exhibit thigmotropic responses (Braam, 2005; Zhang et al., 2024b). Upon attachment, tendrils start to coil. This sensing-driven behaviour is particularly advantageous for tendril-inspired robots in practical operations. Yang et al. embedded a fibre-optic twisting sensor into their tendril-inspired robotic gripper to provide critical sensing data, including twining angle, external disturbance, and physical parameters of the target object (Yang et al., 2020), to facilitate high-precision manipulation. Similarly, Naselli et al. integrated tactile sensors into a modular tendril-like robot (Naselli et al., 2024). Based on well-designed sensor structures and signal-processing strategies, minimized sensing and control effort is achieved in detecting environmental contacts. Beyond structural and functional mimicry, Hong et al. developed a kirigami-based gripper with programmable and controllable tendril-like grasping trajectories (Hong et al., 2023), allowing precise manipulation of diverse objects. This study highlights new perspectives on the advantages of tendril-inspired mechanisms in the field of robotics.
Characterized by efficient shape-morphing capabilities and diverse deformation modes, tendril-like robots have demonstrated potential in deep-sea exploration (Hong et al., 2023), adaptive gripping under various conditions (Guo et al., 2024; Li et al., 2025; Yang et al., 2020), and rehabilitation assistive devices (Cheng et al., 2021). Moreover, they can serve as actuation components in the construction of integrated robotic systems with advanced functionalities.
2.3 Robots inspired by trapping behaviours
Most plants exhibit slow and often imperceptible behaviours, such as tip-based growth and tendril coiling, as discussed above. However, in scenarios where the plants interact with animals (mainly insects), plants have to act as rapidly as, or even faster than, animals to ensure successful and efficient outcomes. For instance, certain carnivorous plants (e.g. Dionaea muscipula, Aldrovanda vesiculosa L., and Utricularia) can act rapidly on the microsecond level to actively trap and capture insects using their specialized leaves, thereby obtaining essential mineral nutrients.
Dionaea muscipula, also widely known as Venus flytrap, is a typical example of plants with specialized prey-trapping capabilities (Darwin, 1875b). Upon conditional stimulation of mechanosensitive hairs located on the inner surface of the lobes, the trap closes within about 100 ms (Forterre et al., 2005). It is noteworthy that the successful closure usually requires two successive stimuli within about 30 s (Burri et al., 2020). This short-term signal memory and biological timing relies on changes in cytosolic Ca2+ concentration in cells (Suda et al., 2020), without the involvement of a nervous system as in animals. In order to realize repetitive trapping and reversible operation (Durak et al., 2022), the lobes undergo a rapid closing and slow reopening cycle (Zeng et al., 2025) where active cells are involved. The rapid trapping is achieved through snap-buckling of the curved lobes (Forterre et al., 2005) which can be reasonably interpreted as bi-stable compliant mechanisms allowing fast transition between open and closed states. Active cells are not direct actuators for the rapid closure due to their intrinsic slow nature of swelling and shrinking mechanisms (Joyeux, 2011), but they mediate reopening of the lobes by selectively transporting K+ or Cl− between cell walls, in accordance with the chemical principle of osmotic pressure equilibration (Joyeux, 2011). This ion transport gradually establishes a hydraulic pressure difference between the inner and outer epidermis, causing the lobes to bend backward and reopen (Sachse et al., 2020).
From the energy aspect, the variation in strain energy contained in the trap lobes during rapid closure is presented in Fig. 4. The open and closed states of the curved lobes correspond to two local minima of strain energy, which are unequal in magnitude. The relatively lower strain energy at the closed state facilitates rapid closure, whereas the higher strain energy of the open state accounts for the longer reopening period due to the slow accumulation of a larger stored strain energy (Zeng et al., 2025).
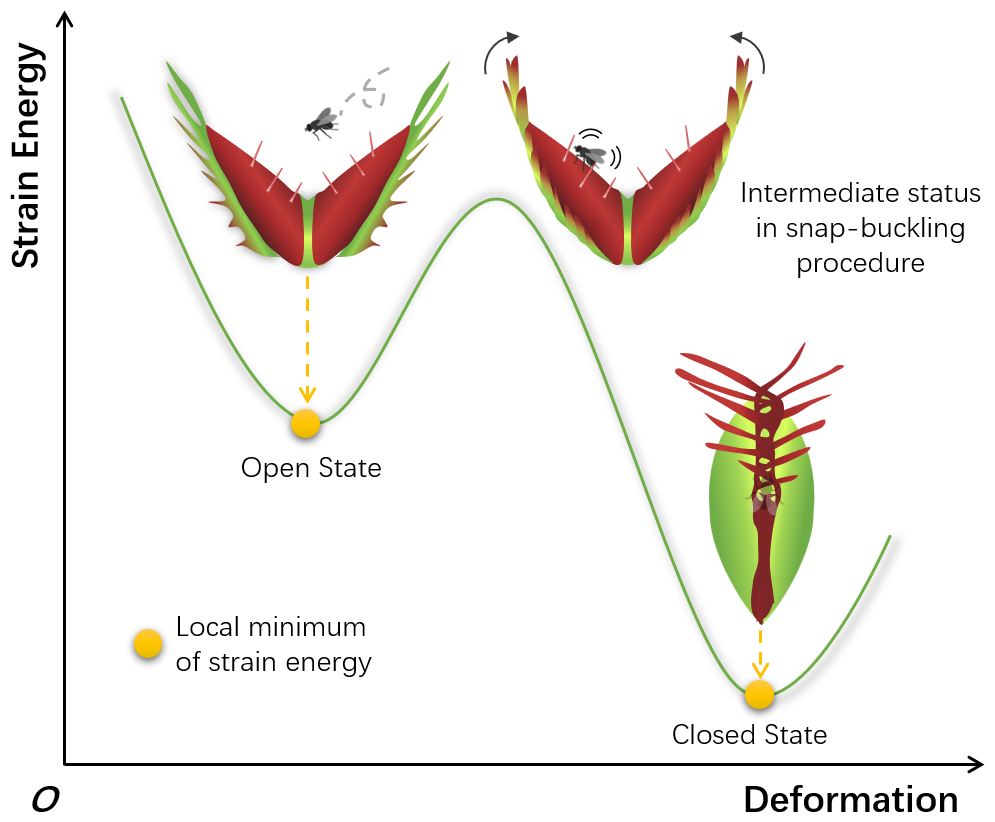
Figure 4Variation in strain energy contained in the trap lobes during rapid closure (Zeng et al., 2025; Sachse et al., 2020).
The Venus flytrap and its rapid trapping behaviours have attracted increasing attention in the robotic filed (Gong et al., 2025; Esser et al., 2020; Wang et al., 2023). Robotic flytrap designs reported in the literature can be broadly classified into two categories based on their underlying principles to achieve gripping: (1) structural bi-stability and (2) responsive material morphologies under external stimuli.
In the first category, bi-stable mechanisms are adopted to replicate the rapid closure behaviours of Venus flytraps on the millisecond scale. Compliant mechanisms are particularly suitable due to their advantages of monolithic, simple structures and the ability to store elastic energy. Laminated carbon-fibre-reinforced prepreg (CFRP) shells are commonly adopted in such designs (Zhang et al., 2023; Kim et al., 2014; Zhang et al., 2016; Zhang et al., 2022; Kim et al., 2011). Thanks to the rapid snap-buckling transition of curvature between two stable states (Wu et al., 2024), these mechanisms can naturally grasp the targeted objects. For example, Lin et al. developed a soft gripper based on bi-stable compliant mechanisms in finger-like shapes (Lin et al., 2021). This gripper is capable of rapidly detecting and capturing fast-moving objects such as a thrown baseball. Its flexibility originates from both the inherent compliance of the CFRP materials and its capability to adapt to the kinematic characteristics of target objects.
Bi-stability can also be realized through origami-based mechanisms (Wang et al., 2024a), which are regarded as a sub-branch of compliant mechanisms (Greenberg et al., 2011). Zhang et al. (2023) employed an origami-based bi-stable mechanism as their structural solution for flytrap-inspired gripper, enabling rapid transitions between stable states for efficient gripping. The tensegrity structure also shows bi-stability. Zhang et al. (2024a) leveraged this bi-stable feature to develop a tensegrity-based flytrap-inspired gripper, which achieved rapid gripping through snap-buckling while demonstrating high adaptability, speed, and stability. To activate these mechanisms, external actuators are required to supply energy and trigger snap-through across the energy barrier between the two stable states. In addition to the fast responsive gripping, the pre-stored elastic energy in bi-stable mechanisms also enhances the output forces and load capacity of flytrap-inspired grippers (Wang et al., 2020). Reported actuation methods include pneumatic chambers (Wang et al., 2020; Yang et al., 2023b), electromagnets (Zhang et al., 2016), and shape memory alloys (Zhang et al., 2023; Kim et al., 2014).
To date, only bi-stable mechanisms, either fully compliant or rigid–flexible hybrids, have been adopted in the design of flytrap-inspired grippers. In contrast, there exist various multi-stable mechanisms with more than two stable states (Oh and Kota, 2009; Chen et al., 2011) and diverse, fast stable-state-transferring modes (Liang et al., 2025). These mechanisms offer novel structural solutions for next-generation flytrap-inspired robots, enabling rapid snapping among multiple stable states and thereby supporting advanced functions such as trapping, gripping, or even computing capabilities.
In the second group of artificial flytraps, the lobe closure is primarily driven by the stimulus-responsive morphology of materials. The materials or structures are normally tailored in flytrap-like shapes. Stimulated by external disturbance, the artificial lobes bend inwards and subsequently grasp the objects. A wide range of actuation methods has been reported, including pneumatic pressure (Li et al., 2021a; Tauber et al., 2022), thermal expansion (Duan et al., 2024), light-induced deformation (Lim et al., 2017; Wani et al., 2017), and electro-ionic bending (Shahinpoor, 2011; Li et al., 2023a). In terms of materials, hydrogels are particularly attractive for bio-inspired robotics due to their softness, stimulus-responsiveness, programmability, and transparency (Park et al., 2024). For instance, Athas et al. developed an enzyme-triggered artificial flytrap based on a hybrid hydrogel (Athas et al., 2016). Exposure to an enzyme led to the cleavage of gelatin chains, which in turn induced asymmetric swelling in the multi-layered hydrogel, resulting in inward bending and the grasping of objects. Wei et al. utilized a tailored thermally responsive hydrogel in their study (Wei et al., 2022). Upon touch, the multi-layered actuator bent naturally because the generated heat lowered the stiffness of one layer and removed the restriction imposed on the other pre-stretched layer.
Due to the stimulus-responsive morphology, these designs intrinsically integrate sensors within the deformable structures, thereby mimicking the inherent sensing–actuation coupling of Venus flytraps. However, their response time is typically on the order of seconds, which is slower than the rapid snap-buckling motions of bi-stable designs in the first group. To overcome this limitation, hybrid flytrap-inspired designs that combine bi-stable mechanisms with the stimulus-responsiveness of smart materials are expected. Owing to their adaptability in shape, structural softness, and rapid gripping capability, flytrap-inspired robotic grippers hold promise for applications such as space debris capture (Zhang et al., 2023; Liu et al., 2022b), fruit harvesting (Gong et al., 2025), rehabilitation assistance (Duanmu et al., 2025), and industrial part sorting.
Closely related to the Venus flytrap, Aldrovanda vesiculosa L. (waterwheel plant) is a rootless aquatic herb capable of capturing small aquatic invertebrates with traps similar in shape to those of Venus flytraps (Poppinga and Joyeux, 2011; Joyeux, 2011). Unlike the bi-stable buckling of curved lobes in Venus flytraps, rapid snapping in Aldrovanda is achieved through kinematic amplification of the bending deformation of the midrib (Poppinga and Joyeux, 2011). This mechanism is considered a structural adaptation for underwater operation, enabling rapid trapping with reduced fluid disturbance and minimal energy dissipation (Poppinga and Joyeux, 2011). Utricularia (bladderworts) represent another genus of aquatic carnivorous plants with ultrafast trapping capabilities. They are distinguished by their unique trapping method. The active cells pump water out of the bladder-like trap to create hydrostatic pressure difference between the inside and outside of the traps. Driven by the pressure difference, the trap rapidly ingests the prey along with the surrounding water once the lid opens in response to a stimulation signal detected by the sensitive hair. In both species, rapid trapping is repeatable. The closed traps are automatically reset by active cells through water transport across cell membranes (Shin et al., 2024).
These carnivorous plants vividly demonstrate the rich diversity of plant mechanisms and structures that enable rapid motions, even faster than animals in some cases. They continuously inspire the development of advanced robots with strong environmental adaptability and rapid responsiveness to dynamic external stimuli. However, to the best of authors' knowledge, robotic designs mimicking the rapid trapping behaviours and structural principles of Aldrovanda vesiculas and Utricularia have not yet been reported and remain to be explored. By contrast, Nepenthes, a well-known genus of carnivorous plant (Bauer et al., 2015), relies on a passive trapping mechanism without rapid movements (Mithöfer, 2022). Therefore, corresponding bio-inspired designs are not included in this review.
2.4 Robots inspired by other on-plant behaviours
In addition to the three remarkable on-plant behaviours discussed in the previous sub-sections, various other on-plant behaviours observed across different species and life stages have also inspired the development of robotic systems with specialized functions. This sub-section reviews and summarizes these additional plant-inspired robotic designs.
Flowers are pivotal reproductive structures in the life cycle of flowering plants. Blooming is a morphological process in which folded petals gradually grow and unfold in a certain order and over a varying period of time depending on the species. The radial symmetry and dynamic blooming patterns of flowers have inspired the design of artificial flower-like robotic systems. Gao et al. developed a flower-like robotic gripper composed of a silicon-based polymer embedded with ferro-magnetic particles (Gao et al., 2016). Actuated by an external magnetic field, the gripper exhibited rapid responsiveness, adaptability, and controllability in both air and liquid environments. Pan et al. introduced a stimulus-responsive bi-layered hydrogel–elastomer micro-actuator capable of reversible bending under humidity and light (Pan et al., 2021). Using these hybrid actuators as petals, they fabricated an artificial flower which could grasp and release objects in a claw-like manner, controlled by environmental light irradiation and environmental humidity. Zhang et al. (2022b) demonstrated a flower-inspired robotic gripper with bi-stable CFRP petals, Gao et al., 2022). Gripping and releasing were enabled by pneumatically actuated snap-through transitions between the two stable states of the compliant petals.
Jeong et al. developed a flower-like paper robot for autonomous water quality monitoring (Jeong et al., 2024). Heavy metal contamination was detected and visually indicated through a flower-blooming-like motion driven by selective microfluidic transition logic. This system offered a low-cost, eco-friendly, effective, easily recognizable, and energy-independent solution suitable for large-scale deployment in resource-limited environments. Peeketi et al. mimicked the blooming of the Calla lily, characterized by its single spathe, using a tapered actuator composed of a splay-nematic liquid crystal polymer network (Peeketi et al., 2023). This actuator could transform from a flat film into a conical structure in response to elevated temperature. Pan et al. replicated flower blooming using shape memory alloy actuators which were remotely controlled by smartphones or computers (Pan et al., 2018).
Certain plants exhibit leaf-folding movements either at night (nyctinasty) (Minorsky, 2019; Muraoka and Ueda, 2024) or in response to mechanical stimuli (thigmonasty) (Braam, 2005). Mimosa pudica (sensitive plant) is a well-known example of plants with these nastic movements, exhibiting fast leaf-folding responses (Ahmad et al., 2012). Upon external stimuli, M. pudica closes its leaves as a self-defensive behaviour to deter predators and avoid or minimize other potential damage (Naglich and LeDuc, 2024). These reversible motions are driven by turgor pressure changes within pulvini cells. Aishan et al. directly exploited this stimulus-responsive action of M. pudica to control the opening and closing of a micro-valve (Aishan et al., 2022). In their experiments, both intact and excised branches provided sufficient force to operate the valve in a regulated manner. Inspired by this leaf-folding behaviour, Mader et al. developed a hinge-free compliant actuator powered by pneumatic pressure (Mader et al., 2020). By integrating multiple pneumatic actuation cells in series, they constructed an artificial midrib that effectively enabled wing hoisting of a facade shading system.
Some plants dynamically reorient their flowers or leaves toward the Sun, a phenomenon known as heliotropism (Atamian et al., 2016). For example, young sunflower plants track the Sun from east to west during the day and reorient toward the east at night. This solar-tracking behaviour is regulated by antiphasic elongation of stem tissues on the east and west sides (Atamian et al., 2016). Inspired by this behaviour, Cezan et al. reproduced light-responsive Sun-tracking and leaf-opening behaviours using an origami/kirigami paper robot (Cezan et al., 2020). Due to faster water evaporation on the illuminated side, the hydrogel muscles shrank asymmetrically, which induced stem bending and leaf opening toward the light source. This bio-inspired robotic device demonstrates potential for solar energy harvesting (Aishan et al., 2022), along with embedded sensing and intelligent functionalities (Cezan et al., 2020).
In the germination stage, the seed embryo develops into a seedling as programmed by its genetic information, through a coordinated process involving physical, chemical, and biological factors. The sprouts not only undergo pronounced morphological changes in shape and size but also generate substantial forces capable of displacing obstacles such as soil and gravel. The chemical energy stored in the seed is converted into metabolic energy, which in turn drives these mechanical growth forces (Nietzel et al., 2020). Harnessing the actuation output, both displacement and force during germination, Murakami et al. developed a rotational robot and a robotic gripper powered by germinating seedlings (Murakami et al., 2024). The seedlings embedded in these devices provided operational forces, demonstrating the feasibility of creating eco-friendly robots that utilize living plants as both actuators and environmental sensors.
Once stimulated by a nectar-gathering insect, the flower of Stylidium spp. (trigger plants) rapidly flips its floral column from the anterior petal to the posterior, briefly striking the insect to transfer pollen without harm (Joyeux, 2011). After this rapid motion, the insect is released. This strategy greatly improves pollination efficiency. Inspired by this powerful actuation mechanism, Zhang et al. (2022a) developed a mechanical meta-structure composed of a curved compliant beam constrained by a tunable spring (Wang et al., 2022). By controlling spring deformation, the structure could switch between mono-stable and bi-stable states. Exploiting its tunable force–displacement relationship, the system achieved rapid release of attached objects by snap-buckling in the bi-stable configuration and recovered its adhesive capability by reverting to the mono-stable state.
Pollen grains of plants exhibit nanospike-like morphology and spacious inner cavities, with a wide variety of shapes and sizes across species (Sun et al., 2020; Mundargi et al., 2015). They are among the most resistant biological structures, capable of withstanding extreme environments and remaining preserved for millions of years (Maric et al., 2020). Drawing inspiration from these unique morphological features, Lee et al. developed a 3D-printed multi-functional hydrogel micro-robot for targeted active drug delivery and controllable attachment to biological tissues in medical areas (Lee et al., 2023). Due to its delicate spatial architecture and innovative fabrication approach, this microrobot demonstrates decoupled stimulus-responsiveness, including magnetically actuated locomotion, temperature-responsive controllable attachment, and pH-responsive on-demand cargo release.
Table 1Summary of on-plant behaviours and corresponding plant-inspired robots.
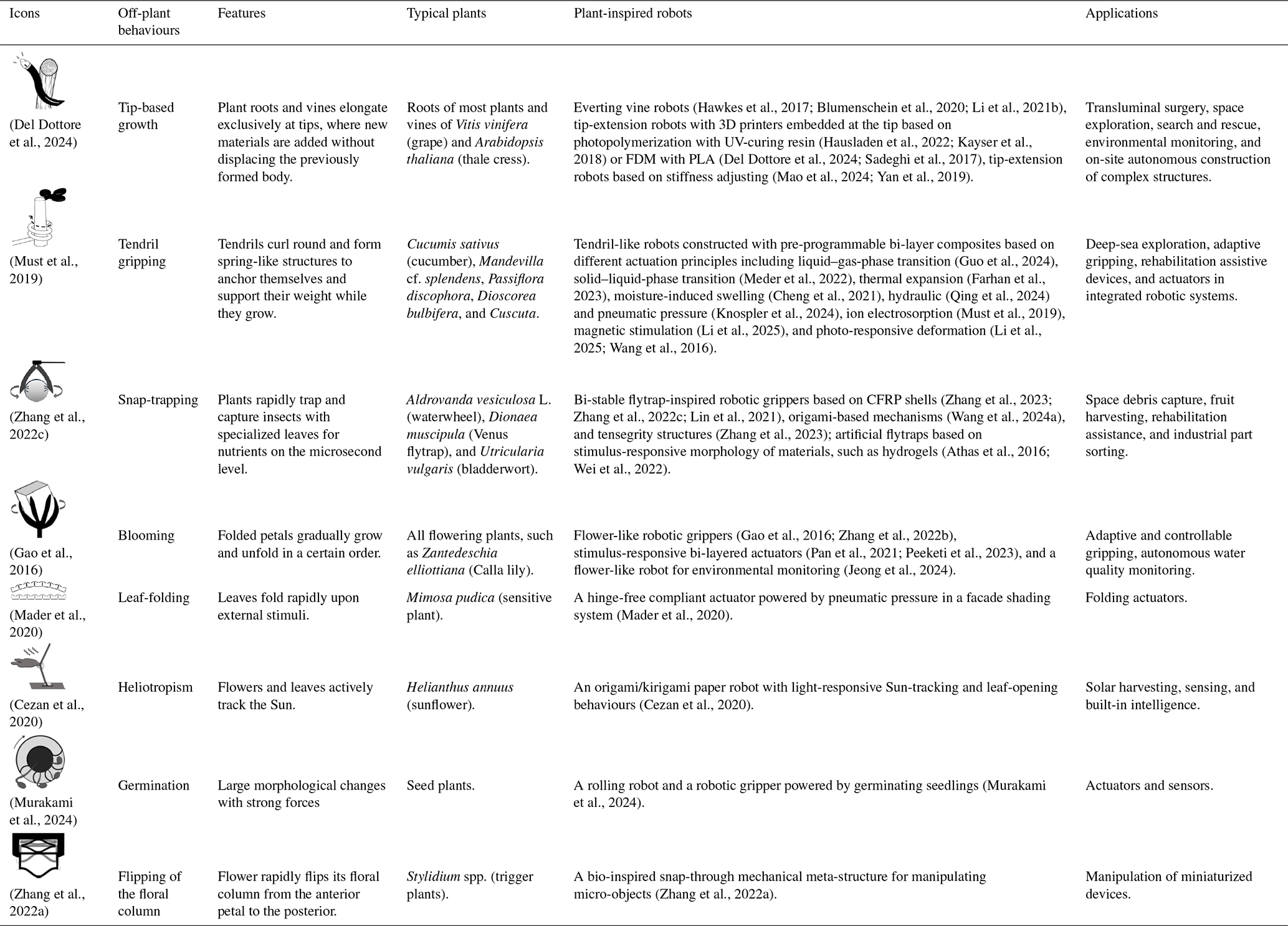
2.5 Summary
On-plant behaviours, defined as motions exhibited by plants as monolithic living systems, occur during most stages of the plant life cycle, including germination, growth, flowering, and fruiting stages, except for the seeding stage. Robots inspired by these behaviours, as reported in the literature, are discussed and categorized in previous sub-sections, corresponding to growth, gripping, trapping, and other specialized on-plant behaviours. The diversity of on-plant behaviours has also given rise to the diversity of plant-inspired robots in their functions and applications. For clarity, the key features of on-plant behaviours, representative plant examples, and corresponding plant-inspired robots are summarized and comparatively illustrated in Table 1.
Plants also present many other striking behaviours in nature, several of which are highlighted below. Selaginella lepidophylla (resurrection plant) can curl into a compact nest–ball shape upon dehydration (Rafsanjani et al., 2015). This morphological adaptation helps the plant to prevent photo-inhibitory and thermal damage in arid environments. The growing shoots of climbing plants display circumnutation, enabling them to encounter and attach to supports for climbing despite lacking visual organs (Agostinelli et al., 2020; Raja et al., 2020). After a pollen grain lands on the tip of a flower pistil, the pollen tube, which is on the micrometre scale, can grow and navigate up to 30 cm toward the egg cell located deep within the pistil (Higashiyama, 2017). To the best of the authors' knowledge, robots inspired by these behaviours or their associated structures have not yet been reported in the literature. Future studies may explore such inspirations to develop more advanced robotic systems based on diverse on-plant behaviours.
At the end of a parent plant's life cycle, seed dispersal is a critical stage that ensures the transfer of genetic material to the next generation. For most of their lifetime, plants act as monolithic living systems with highly localized activities, as illustrated in Fig. 1. In the dispersal stage, however, specific structures of the plants – particularly mature seeds – are able to travel away from the parent, enabling regeneration in new sites. Plant activities in this period include primary dispersal and secondary dispersal behaviours (Vander Wall et al., 2005), which are collectively defined as off-plant behaviours herein. In order to reduce competition among offspring for survival resources and expand their ecological territory of the species, plants tend to disperse the seeds as far as possible. They have evolved various strategies to obtain sufficient kinematic energy to maximize seed dispersal distance. These strategies generally fall into two categories, depending on whether external vectors are involved: (1) allochory and (2) autochory (Netto et al., 2022).
In allochory, seeds can be dispersed over distances of up to several kilometres by external dispersal agents such as wind, animals, or water, which are termed as anemochory (Vittoz and Engler, 2007), zoochory (Iluz, 2010), and hydrochory (Hyslop and Trowsdale, 2012), respectively. In contrast, autochory refers to seed dispersal without the assistance from external vectors, typically resulting in shorter dispersal distance (Vittoz and Engler, 2007). Autochory can be further sorted into four groups. In ballochory, seeds are violently ejected by rapid release of accumulated strain energy in the form of fruit explosion (Niwa, 2024). In herpochory, seeds actively move across the soil surface powered by environmental humidity changes (Vittoz and Engler, 2007). In barochory, mature seeds or fruits simply fall from the plant under the influence of gravity (Griz and Machado, 2001). In the last type, blastochory, the plant stem creeps along the ground to deposit seeds farther from the parent plant (Vittoz and Engler, 2007).
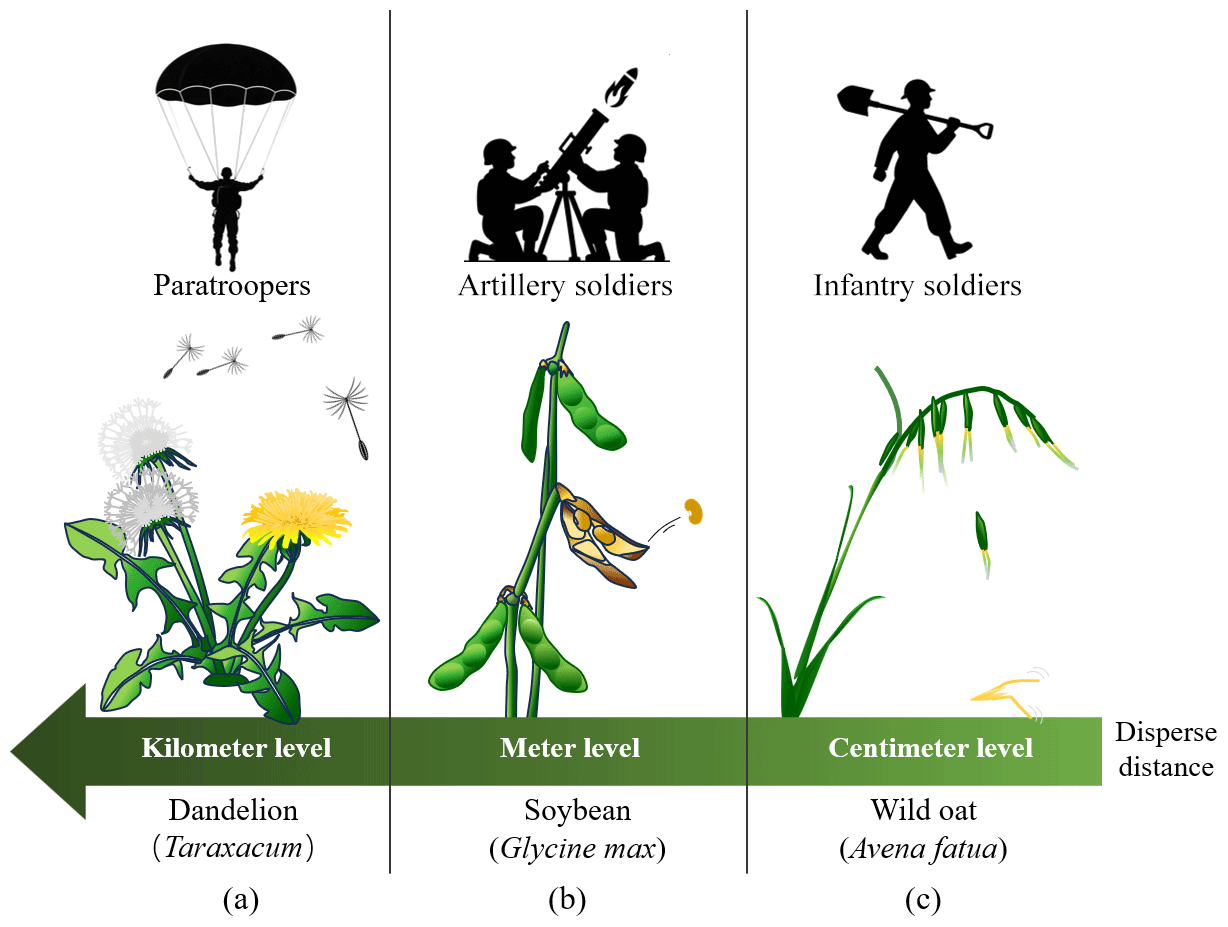
Figure 5Representative plant examples of the three seed dispersal strategies highlighted in this review. (a) Dandelion: wind-aided dispersal (anemochory), symbolized as a paratrooper; (b) soybean: explosive dispersal (ballochory), symbolized as an artillery soldier; (c) wild oat: autonomous on-ground movement after dispersal (herpochory), symbolized as an infantry soldier.
In this review, we focus specifically on three seed dispersal strategies: wind-aided dispersal (anemochory), explosive dispersal (ballochory), and autonomous on-ground movements of dispersed seeds (herpochory). In these cases, seeds and/or parent plants exhibit distinctive dynamic off-plant behaviours in various forms. For emphasizing their dynamic characteristics, these three seed dispersal strategies are schematically illustrated in Fig. 5 using three representative plant examples. Furthermore, they are correspondingly symbolized with three types of soldiers (i.e. paratroopers, artillery soldiers, and infantry soldiers, respectively) by analogy to facilitate intuitive understanding. These seed dispersal strategies offer both conceptual and structural inspiration for the development of advanced plant-inspired robots, which are introduced in the following sub-sections and are summarized in the last summary sub-section.
3.1 Robots inspired by wind dispersal behaviours
Airflows are ubiquitous on Earth, and plants have evolved diverse mechanisms to make full use of them for long-distance seed dispersal, sometimes spanning several kilometres from the parent plant (Greene, 2005; Cummins et al., 2018; Mazzolai et al., 2021). For successful wind-aided dispersal, effective aerodynamic shapes are prerequisites for the lightweight seeds (Nathan et al., 2011). Among anemochory seeds, two common types are winged seeds and pappose seeds (Minami and Azuma, 2003). Winged seeds, also known as samaras, are characterized by flattened fibrous wings whose number and shapes vary substantially across species (Le et al., 2024). A common aerodynamic mechanism is that these wings reduce terminal velocity, thereby extending potential dispersal distance by wind. Winged seeds are typically found in woody flowering trees (Liu et al., 2025), such as Acer spp. (maples) and Pterocarya stenoptera (Chinese wingnuts), and in some climbing plants, such as Tristellateia australasiae (Australian gold vines) and Alsomitra macrocarpa (Javan cucumbers) (Viola and Nakayama, 2022). Releasing seeds from elevated positions further enhances wind dispersal efficiency.
A pappose seed typically consists of an achene (containing the genetic material) and a bundle of bristly filaments that form a pappus acting as a drag-enhancing parachute (Andersen, 1993; Cummins et al., 2018). Compared with other types of anemochory seeds (Mariani et al., 2024), the pappus generates high drag, enabling the slowest vertical descending flight of the seed (Azuma, 2007). This prolonged suspension provides greater opportunity for lateral wind currents to transport the seeds over long distances (Iyer et al., 2022). Pappose seeds are commonly found in Compositae, Poaceae, Apocynaceae, and Salicaceae families (Mazzolai et al., 2021). Dandelions (Taraxacum officinale agg.) represent highly successful examples of the pappose seeds due to their effective wind-aided dispersal. A dandelion is presented in Fig. 5a as an example of anemochory plants. Owing to their aerodynamic performance, wind-dispersed seeds can be analogized to paratroopers. It is noteworthy that the bristly filaments can also collect rain droplets to promote germination in addition to wind-aided dispersal (Hale et al., 2010).
The passive flight behaviours of wind-dispersal seeds have attracted significant research attention. Inspired by both winged and pappose seeds from various species, robotic fliers with diverse structural configurations have been developed. For example, Kim et al. (Kim et al., 2021) and Yoon et al. (Yoon et al., 2022) independently designed three-wing 3D robotic fliers inspired by Tristellateia seeds. Kim et al. demonstrated the scalability of their fliers across a broad range of dimensions and achieved controllable rotational kinematics during descent. In contrast, Yoon et al. emphasized the critical role of geometric configurations in optimizing the aerodynamic performance of fliers. A series of fliers with assorted 3D geometries were proposed and assessed. Both designs showed potential as wind-aided carriers for deploying electronic and colorimetric sensors in environmental monitoring applications.
Cikalleshi et al. (2023) and Nexha et al. (2025) directly mimicked the aerodynamic shapes of natural seeds, Acer campestre seeds and Ailanthus altissima seeds, respectively, in their winged robotic fliers. Their designs successfully reproduced aerodynamic and wind-dispersal characteristics comparable to those of natural seeds. In both studies, functional nanoparticles were integrated into the fliers for sensing and indicating the environmental parameters. The flier developed by Cikalleshi et al. employed temperature-sensitive luminescent particles to indicate topsoil temperature via near-infrared light emission. In contrast, the flier designed by Nexha et al. could detect and show the environmental humidity by changing the colour of the fluorescence emission after wind-aided deployment.
Inspired by the dandelion seeds, Iyer et al. developed scalable and flexible porous micro-fliers which were fabricated from polyimide thin films using a laser-cutting technique (Iyer et al., 2022). These fliers exhibited low terminal velocities and stable aerodynamic performance. Powered by lightweight solar cells, their integrated circuits on the flier were capable of collecting environmental data and transmitting them wirelessly. Likewise, Mariani et al. designed a biodegradable porous parachute flier inspired by the plumed seeds of Tragopogon pratensis, featuring a 3D-printed micrometric-thick pappus (Mariani et al., 2024). This design successfully reproduced the aerodynamics and slow descent of natural seeds, while allowing the integration of colorimetric environmental indicators with minimal influence on aerodynamic performance. In order to further advance passive flight capability, Kim et al. developed a hybrid flyer system that sequentially combined a parachuting flier (inspired by dandelion seeds) with an autorotating flier (inspired by maple seeds) (Kim et al., 2024). By integrating the advantages of both dispersal strategies, this design increased payload capacity while further reducing descent speed.
Due to aerodynamic effects, even slight changes in the shape of a flier can significantly alter its falling behaviours. Researchers have therefore sought to regulate the descent velocity and dispersal distance of artificial fliers by altering their shapes. Drawing inspiration from the flight mechanism of dandelion seeds, Chen et al. (2023a) and Yang et al. (2023a) proposed two light-driven shape-morphing micro-fliers, respectively. Unlike the natural seeds, the morphology of their pappi could be remotely controlled by light irradiation during passive flight. This feature thus enabled manual tuning of terminal velocity, drag coefficient, and wind threshold for dispersal. However, these designs required continuous light exposure, resulting in high energy consumption. To address this limitation, Johson et al. (2023) and Yang et al. (2024) incorporated bi-stable compliant mechanisms into their fliers which were also inspired by the passive seed flight. Aerodynamic modes and dispersal distances were controlled through rapid snap-buckling of the bi-stable structure, which only required a one-time energy input. Johson et al. triggered the stable-state transformation of their origami-based bi-stable mechanism via a low-power electromagnet actuator integrated on the flier (Johnson et al., 2023). Powered by an integrated solar energy harvesting circuit, sensing and data transmission were also available. In contrast, Yang et al. (2024), achieved rapid wing deformation though a bi-stable mechanism which was actuated by one-shot UV light illumination. The need for continuous light irradiation to maintain desired flight morphologies was eliminated.
Winged seeds naturally enter stable autorotation during descent. Inspired by their aerodynamic stability, Bai et al. designed a samara-inspired robot equipped with two rotors (Bai et al., 2022). This bio-inspired drone achieved hovering flight with significantly lower power consumption than conventional benchmark multi-rotor drones. Exceeding the aerodynamic performance of natural winged seeds, the revolving-wing drone could be controlled to reach targeted positions in space.
Plant-inspired robotic fliers exhibit multiple advantages, including low cost, bio-degradability, eco-friendliness, and minimal need for human intervention. They serve as suitable platforms for aerial deployment of lightweight payloads such as seeds, wireless electronic devices, colorimetric indicators, and fertilizers, particularly in large areas and hard-to-reach locations. Representative applications include post-fire reforestation (Kelly et al., 2020), precision agriculture, and environmental monitoring (Cikalleshi et al., 2023; Yoon et al., 2022; Nexha et al., 2025). In the future, they could potentially be utilized as solar sails and robotic spacecraft for space exploration (Chen et al., 2023a).
3.2 Robots inspired by explosive dispersal behaviours
In addition to the assistance of external dispersal agents, some plants are able to achieve long-distance dispersal by launching the seeds with high initial velocities. In contrast to wind-dispersal seeds, explosively dispersed seeds can be analogized to artillery soldiers (as illustrated in Fig. 5b), which propel projectiles over a distance. Such seed-dispersal ranges can reach up to tens of metres (Hinds et al., 1963; Poppinga et al., 2019; Swaine and Beer, 1977). However, because water transport within cells and tissues is relatively slow, turgor-driven movements and hygroscopic motions alone are insufficient to directly propel seeds at a high speed (Geitmann, 2016; Galstyan and Hay, 2018). To overcome this limitation, plants employ a “slow energy accumulation–fast release” strategy, enabling explosive seed discharge. The accumulation and storage of strain energy are accomplished via turgor-driven movements of living cells and/or hygroscopic motions of dead tissues within fruits. The pre-stored strain energy is then rapidly released through structural instability, typically snap-buckling or explosive fracture (Galstyan and Hay, 2018). It should be noted that these explosive behaviours are irreversible.
Some plants, such as Glycine max (soybean) (Liu et al., 2022a), Hamamelis mollis (Chinese witch-hazel) (Poppinga et al., 2019), and Bauhinia variegata (orchid tree) (Galstyan and Hay, 2018), gradually accumulate stress in their lignified tissues through asymmetric shrinkage of bi-layer structures during dehydration (Elbaum and Abraham, 2014). In other species, such as Cardamine hirsuta (popping cress) (Pérez-Antón et al., 2022; Cullen and Hay, 2024) and Impatiens capensis (orange jewelweed) (Hayashi et al., 2009), strain energy is primarily accumulated as considerable osmotic pressure in the pod tissues. Asymmetric lignin deposition within pod cell walls is also indispensable in this process (Pérez-Antón et al., 2022). When the plant fruits become fully mature, sufficient strain energy is stored in the valves, and the energy barrier is finely tuned to a perfect level where explosion can be triggered by minimal environmental disturbances (Jiang et al., 2023), such as a light breeze, raindrops, or animal contact. The seeds are then violently ejected away at high velocities, as the pre-stored strain energy is converted into the kinetic and potential energy of seeds. The presence of curved or twisted pod valves after seed release further evidences the storage and release of elastic energy in these ballistic fruits (Armon et al., 2011; Elbaum and Abraham, 2014).
By contrast, plants such as Ecballium elaterium (squirting cucumber) (Wang et al., 2024b) and Arceuthobium spp. (dwarf mistletoe) (Mathiasen et al., 2008) achieve explosive seed dispersal through the build-up of high hydrostatic pressure. During fruit development, hydrostatic pressure in the glue-like substance mixed with seeds gradually increases, stretching the fruit wall and thereby accumulating strain energy (Wang et al., 2024b). When the internal pressure reaches a critical threshold, the fruit wall fractures along the abscission zone. The fruit wall then contracts rapidly, hurling the seed upward with high velocity and acceleration (Wang et al., 2024b; Galstyan and Hay, 2018).
Bi-stable compliant mechanisms are ideal structural solutions to replicate the instability of explosive seed dispersal because of their advantages, including structural monolithism, inherent elastic energy storage, and rapid snap-through responses. However, the energy barrier between two stable states is generally high, requiring substantial energy input to trigger the transition between two stable states (Liang et al., 2022). Inspired by the explosive seed dispersal behaviour of Impatiens pods, Zhang et al. (2025) proposed a bi-stable robotic gripper with in situ energy barrier modulation, which overcame the limitation of fixed energy barriers in conventional systems. The bi-stability of the robotic gripper was realized through an elastic curved beam whose curvature could be dynamically adjusted by a motor-driven mechanism. Building on the same concept, Jiang et al. achieved a tunable energy barrier using an origami-based bi-stable mechanism (Jiang et al., 2023). These designs enable the energy barrier to be lowered to very low levels, efficiently mimicking the high sensitivity of mature Impatiens pods to external disturbances. The resulting robotic grippers combine sensitivity to low triggering forces, rapid response, and grasping stability.
Typically, the energy barrier required for triggering explosion in ballistic fruits gradually decreases in the maturing stage (Jiang et al., 2023). Qing et al. achieved this time-dependent autonomous energy barrier elimination function based on a compliant metashell constructed from viscoelastic materials (Qing et al., 2025). Once elastic energy was pre-stored, the metashell autonomously released the energy in the form of delayed snapping and jumping after a programmable period of time. The metashell was further demonstrated as an artificial ballistic pod capable of autonomous explosive seed dispersal after a programmable delay.
Inspired by the pressure-induced fluidic squirting mechanism of squirting cucumbers, Liu et al. developed thermo-triggered squirting capsules for medical nanoparticle delivery (Liu et al., 2010). Upon heating, the thermo-responsive hydrogel shells of these capsules dramatically shrunk and ejected nanoparticles rapidly through sudden rupture. Similarly, Wang et al. designed a light-driven hydrogel launcher by mimicking the explosive dispersal behaviour of squirting cucumbers (Wang et al., 2024b). In this device, internal gas pressure was generated by rapid liquid vaporization triggered by the photothermal response of an embedded graphene suspension. Once the accumulated strain energy was released, the launcher achieved controlled ejection at high velocity.
Instead of launching all seeds simultaneously, a mature pod of Oxalis corniculata (woodsorrel) automatically ejects its seeds sequentially when it is mechanically disturbed. The elastic energy stored in the fruit is gradually transformed into the kinetic energy of the seeds. Inspired by this chained explosive behaviour, Li et al. developed a plant-inspired ejection device which employed bi-layered elastic materials as actuating units to sequentially launch projectiles (Li et al., 2020).
Robotic devices inspired by explosive seed dispersal behaviours have potential applications in smart seeding for agriculture (Wang et al., 2024b; Qing et al., 2025), drug delivery in medical areas (Li et al., 2020; Liu et al., 2010), robotic grippers (Zhang et al., 2025; Jiang et al., 2023), and advanced rapid-response robotics.
3.3 Robots inspired by self-locomotion behaviours of seeds
After dispersal and landing on the ground, seeds of some plants can automatically creep across and drill into the soil, enhancing the germination success of the next generation. This motion is driven by the hygrosensitive morphology of the highly cellulosic seed awns in response to environmental humidity changes (Vittoz and Engler, 2007). The wild oat (Avena fatua) illustrated in Fig. 5c is a typical example with seeds capable of crawling and even jumping (Lindtner et al., 2021), powered by daily humidity cycles. Compared with the two previously discussed dispersal mechanisms, seeds motions in this herpochory manner are generally slow and limited to short distances of several centimetres. The self-propelling seeds of these plants can be analogically regarded as infantry soldiers. Other representative herpochorous plants include Triticum turgidum ssp. dicoccoides (wild wheat) (Elbaum et al., 2007), Pelargonium (Ha et al., 2020; Ronzan et al., 2025), and Erodium (Ronzan et al., 2025; Evangelista et al., 2011).
Despite inter-specific and inter-generic differences among these herpochorous plants, their seed awns share a common bi-layer structure (Elbaum and Abraham, 2014). Although the awns are dead tissues, they exhibit remarkable hygroscopic performance. This is because the surface of cellulose microfibrils in the awns is rich in hydroxyl groups, and they can easily form hydrogen bonds with water molecules, leading to the hygroscopic feature (Etale et al., 2023). Owing to the differences in hygroscopic properties between the active and passive layers, together with variations in cellulose microfibril orientation, the awns are able to achieve diverse deformation configurations, such as bending, twisting, and coiling, in response to humidity fluctuations (Elbaum and Abraham, 2014). These deformations are reversible and recur over successive hydration–dehydration cycles. The propulsion direction of the seeds is determined by the tilt of the silicified hairs covering them (Elbaum et al., 2007). From an energy perspective, the seeds harvest environmental energy in the form of humidity gradients and transfer it into kinematic energy through the awns.
Therefore, seeds in the herpochory group can be reasonably regarded as monolithic bio-robots which integrate hygroscopic actuators, environmental energy harvesting, and autonomous morphology for locomotion. Inspired by these remarkable seed dispersal behaviours and corresponding structures, plant-inspired robots with humidity-responsive capabilities have been reported in literature. Fiorello et al. developed a self-dispersing robot, HybriBot, by grafting a pair of awns from a wild oat seed onto a 3D-printed biodegradable capsule (Fiorello et al., 2024). Driven by humidity changes, this robot successfully mimicked the locomotion and functional behaviours of natural oat seeds across various soil conditions. Rather than using natural awns directly as hygroscopic actuators, Cecchini et al. fabricated a seed-like robot via 4D-printing techniques using hygroscopic polymers (Cecchini et al., 2023). Both shapes and humidity-responsive morphology features of Pelargonium appendiculatum (L.f.) seeds were replicated.
Luo et al. significantly enhanced the self-drilling performance of Erodium seeds by adding two extra tails to an Erodium-seed-like robot which was fabricated from wood veneer (Luo et al., 2023). Exceeding the load capability of natural Erodium seeds, this artificial robotic carrier could carry various objects, including biofertilizers and plant seeds in different sizes and weights. Kay et al. also utilized wood veneer as both structural and actuating materials to fabricate a self-propelling robot driven by humidity changes (Kay et al., 2020). Instead of directly mimicking natural seed structures, they designed a four-legged configuration for self-propulsion. By sequentially changing the humidity of each leg in a specific order, they demonstrated a multi-stage actuation method to achieve crawling, rather than changing the humidity of all legs simultaneously.
In addition to humidity changes, Pan et al. incorporated light as a combined stimulus and energy source in their biomimetic robots based on bi-layered hydrogel–elastomer structures (Pan et al., 2021). Diverse motions, including grabbing, crawling, and jumping, were achieved in response to both humidity and light changes. In contrast, Fu et al. developed an evaporation-powered self-rolling robot, Hydrollbot, which operated under constant humidity, eliminating the need for humidity fluctuations (Fu et al., 2022). It achieved spontaneous, continuous, and rapid self-rolling locomotion along programmable trajectories.
Although the structural configurations and locomotion modes of humidity-driven robots vary considerably, their actuators universally rely on asymmetric hygroscopic deformation of bi-layer composites. Applications of these plant-inspired humidity-driven robots include seed sowing and fertilization for reforestation and precision agriculture (Luo et al., 2020; Fiorello et al., 2024), drug delivery in biomedical engineering (Pan et al., 2021; Fu et al., 2022), and low-cost, eco-friendly, and large-scale deployment of sensors for environmental sampling and monitoring (Luo et al., 2020).
Table 2Summary of off-plant behaviours and corresponding plant-inspired robots.
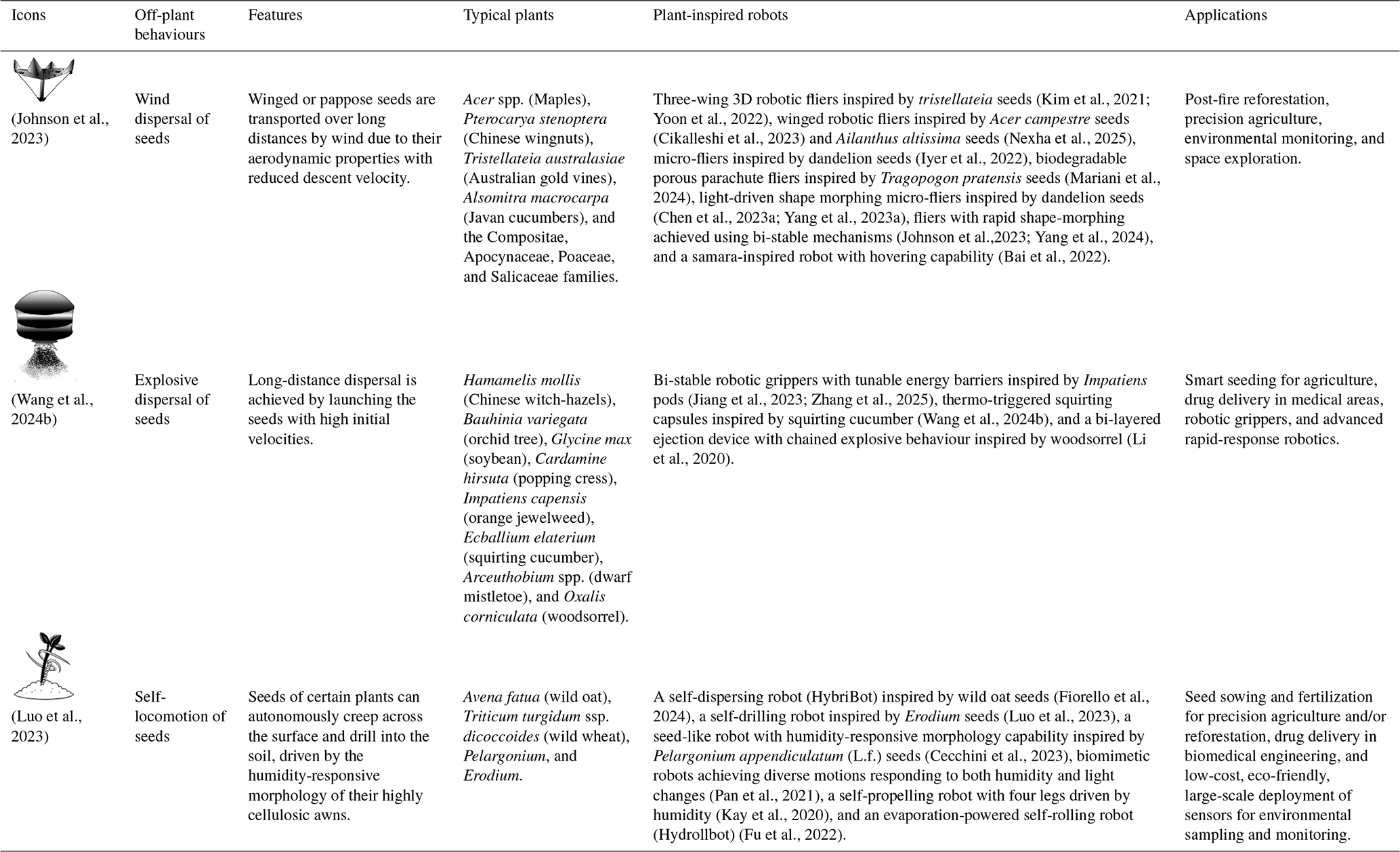
3.4 Summary
Off-plant behaviours involve the movements of both parent plants and their detached parts for seed dispersal, which occur exclusively during the seeding stage of the plant life cycle. This section focuses on three seed dispersal strategies: wind-aided dispersal (anemochory), explosive dispersal (ballochory), and autonomous on-ground movement of dispersed seeds (herpochory). These dynamic plant motions, occurring at different velocities and scales, have inspired robotic designs for diverse functions and applications. For clarity, the key features of these off-plant behaviours, representative plant examples, and corresponding robotic designs are summarized and comparatively presented in Table 2.
As discussed in the previous sections, a wide variety of plant-inspired robots have been developed, drawing inspiration from the diverse survival behaviours and structural adaptations of plants across different species and life stages. However, the structural configurations and functional characteristics of these plant-inspired robots remain quite limited and cannot yet match the vast diversity of plants in nature. This gap is gradually narrowing, driven by increasing research attention devoted to plant survival strategies (Mazzolai et al., 2020; Chen et al., 2025b), expanding knowledge about plant biology (Vanneste et al., 2025), and the continual discovery of new plant species (Shi et al., 2025). In the upcoming future, more advanced plant-inspired robots with novel functions are expected to emerge to address challenges across both engineering applications and scientific research.
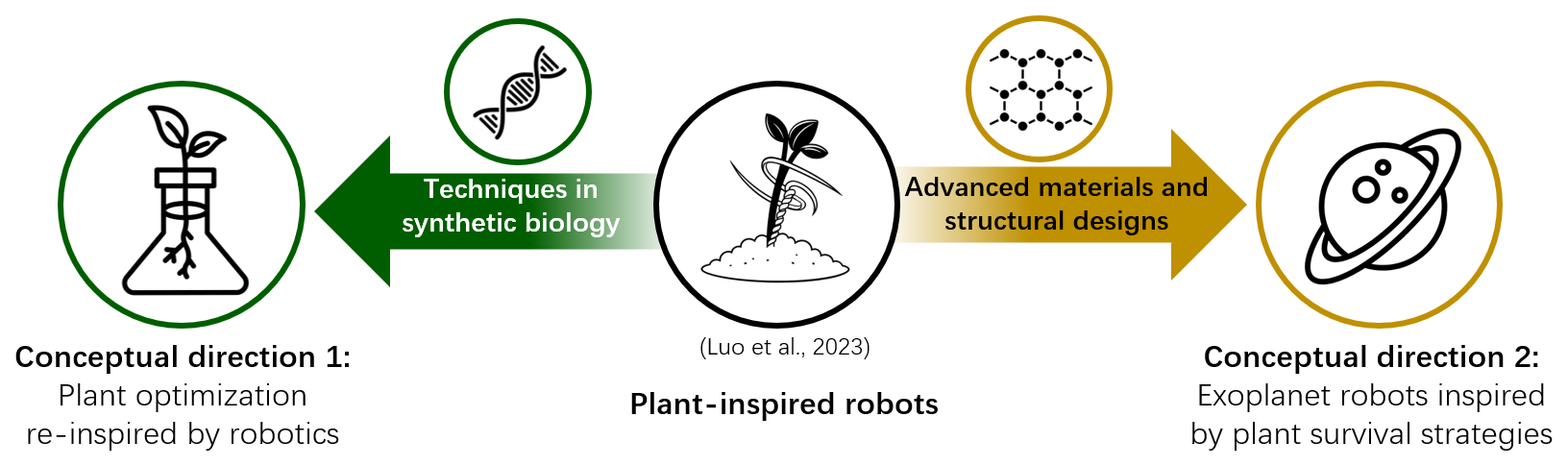
Figure 6Conceptual directions of the plant-inspired robots based on corresponding technologies.
Beyond conventional plant-inspired robots that directly replicate plant behaviours and structures, we propose two forward-looking conceptual research directions for the long-term development of plant-inspired robots: (1) natural plant optimization re-inspired by robotics based on synthetic biology, and (2) the development of exoplanet robots inspired by plant survival strategies. These two concepts are schematically illustrated in Fig. 6.
4.1 Plant optimization re-inspired by robotics
Plants and robots can mutually inspire each other in their evolutionary and developmental trajectories. Plants exhibit highly diversified survival strategies and behaviours based on their intricate biological structures, which provide a vast reservoir of inspiration for designing robots to address challenges in the human world. Conversely, the continuous advancement of robotics with expanding theoretical frameworks and developing methodologies could re-inspire the optimization of plants through human-guided interventions. Based on the advances in synthetic biology (Khalil and Collins, 2010), it has become conceivable to endow plants with enhanced traits, optimized structures, and tailored functionalities. Moreover, developments across related fields, such as gene editing, computational biology, bio-materials, and robotics, collectively establish a solid foundation for pursuing this multidisciplinary vision that bridges the biological and artificial realms.
For example, the effective three-awn configuration of the Erodium-seed-inspired self-drilling robot developed by Luo et al. (Luo et al., 2023) may, in turn, re-inspire the optimization of natural Erodium seeds via gene-editing approaches to enhance the self-burying efficiency and ultimately increase the germination rates. In addition, the wing-like structures of samaras could be further optimized through gene-editing technologies guided by computational simulations to achieve lighter weight, prolonged descent time, enhanced aerodynamic performances, and other desired traits that do not exist in nature. These optimizations could increase the dispersal distance of the winged seeds, thereby expanding the geographical range of the plant species. They can also be designed with various forms of active wing morphing to enhance flight adaptability (Ameduri and Concilio, 2023). These examples presented here illustrate only a fraction of the many possible research conceptions. More plant optimization projects re-inspired by robotics are expected to be proposed and implemented.
Plant evolution is an ongoing process that never ceases. This concept of plant optimization re-inspired by robotics based on synthetic biology can be regarded as a form of guided and accelerated evolution where human intelligence is involved under appropriate bioethical principles. In the future, plants with optimized strategies and behaviours, and even entirely new plants, will be developed.
4.2 Exoplanet robots inspired by plant survival strategies
The diverse plant behaviours introduced in the previous sections are specific manifestations of their survival adaptations to environmental changes and stimuli. Such adaptive strategies are not only effective on Earth but may also be applicable to exoplanets with unique environmental conditions in the universe. By integrating advances in materials science (Geim and Novoselov, 2007; Ahmed, 2015; Dorcheh and Abbasi, 2008) and structural designs, plant-inspired robots that leverage these adaptive principles could be developed to perform on- and off-plant behaviours, similar to those introduced in previous sections, under extraterrestrial environments.
For instance, plant-inspired robots with specialized behaviours could be employed for exploration and navigation on Mars. In certain regions of Mars, surface temperatures drop below the deposition point of carbon dioxide, resulting in the formation of carbon dioxide frost or snow (Leighton and Murray, 1966). The extreme temperature difference in these regions (Sagan and Mullen, 1972; Leovy, 2001) enables the carbon dioxide to deposit at night and to sublimate during the daytime diurnally, a phenomenon that has been directly observed (Khuller et al., 2021). The energy released during this phase transition of carbon dioxide driven by environmental temperature changes can be harnessed to actuate plant-inspired robots constructed from specially designed bi-layer structures. Asymmetric deformation between the two structural layers, induced by carbon dioxide deposition and sublimation, can produce specific morphological changes. This morphological principle is analogous to humidity-driven morphology of plants with bi-layer structures. Building on this principle, plant-inspired robots with tailored structures are expected to achieve diverse behaviours, such as crawling, drilling, jumping, or even explosion, on Mars. Moreover, dandelion-like robotic fliers equipped with fairy pappi made from lightweight, radiation-resistant materials could exploit Martian airflow to achieve passive flight under extreme thermal and atmospheric conditions (Lapotre et al., 2016; White, 1979).
These plant-inspired robots, carried and dispersed by drones or rover probes, are suitable candidates for the large-scale, low-cost autonomous deployment of sensors and microchips on Mars to collect and monitor environmental parameters. Furthermore, when deployed in large numbers, plant-inspired robots could contribute to surface terraforming of Mars by mechanically disturbing the surface soil driven by carbon dioxide phase transition. Such an approach would reduce the reliance on heavy and complex mechanical systems.
In summary, plant-inspired robots can be designed following the survival strategies of plants for exploration on exoplanets. Their adaptive behaviours can be tailored, targeting specific environmental conditions on different exoplanets. Powered by the environmental energy, diverse tasks can be achieved. These robots exhibit multiple advantages, including low cost, structural simplicity, easy deployment, notable payload capacity, effective environmental adaptation, and autonomous operation. They could act as pioneering systems for the exploration and utilization of extraterrestrial environments. Their development could ultimately offer novel paradigms and practical solutions for the investigation of exoplanets.
Plants have evolved diverse survival strategies and behaviours to obtain sufficient resources in the competitive nature over billions of years, providing inexhaustible inspiration for the development of plant-inspired robots. In recent decades, increasing attention has been devoted to plants, and a variety of plant-inspired robots have been reported in literature. This review introduces a new perspective by categorizing plant-inspired robots into two main groups, i.e. robots inspired by on-plant and off-plant behaviours, according to the typical plant life cycle. The first group includes plant-inspired robots related to four types of off-plant behaviours: growth, gripping, trapping, and other specialized behaviours, which are discussed in four sub-sections. In the second group, robots inspired by three types of off-plant behaviours (wind dispersal, ballistic dispersal, and humidity-driven self-locomotion behaviour of plant seeds) are presented across three sub-sections in detail. This categorization framework, based on plant life cycle, is both systematic and expandable. Theoretically, all plant-inspired robots can be covered within this framework. This review offers a robust foundation that can be continuously refined and expanded with future advances in plant-inspired robotics.
In addition, two conceptual directions are proposed for the long-term development of the plant-inspired robots. Firstly, the performance and efficiency of natural plants can be further enhanced and optimized due to the re-inspirations from robotics based on synthetic biology. This concept provides a new perspective to review the mutual reinforcement between plants and robots. Plant evolution can be promoted and guided based on the knowledge gained from robotics and human intelligence. Secondly, plant-inspired robots designed following the survival strategies of plants on Earth hold great potential for exoplanet exploration. Leveraging their adaptive morphologies and powered by energy harvested from local environments, these robots could support the development and utilization of extraterrestrial environments. Deployed in large numbers over wide areas, they can serve as low-cost, autonomous pioneers for diverse scientific missions, offering a novel mode of space exploration.
By replicating the behaviours, corresponding structures, and underlying survival strategies of plants, plant-inspired robots provide innovative and effective solutions across different application fields, including medicine, smart agriculture, and industry. More advanced and diversified plant-inspired robots are expected to emerge in the upcoming future along with expanding knowledge of plant biology and growing research interest.
The code and data used in this work are available from the corresponding author upon reasonable request.
HL conceived the idea of this review and supervised the overall study. HL, CZ, YW, and SW drafted the paper with contributions from all co-authors. All co-authors contributed to reference collection and proofreading. GH provided valuable guidance on this work and revised the paper.
At least one of the (co-)authors is a member of the editorial board of Mechanical Sciences. The peer-review process was guided by an independent editor, and the authors also have no other competing interests to declare.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors. Views expressed in the text are those of the authors and do not necessarily reflect the views of the publisher.
The authors would like to acknowledge the National Natural Science Foundation of China (grant no. 52405008).
This research has been supported by the National Natural Science Foundation of China (grant no. 52405008).
This paper was edited by Pengyuan Zhao and reviewed by two anonymous referees.
Agostinelli, D., Lucantonio, A., Noselli, G., and DeSimone, A.: Nutations in growing plant shoots: The role of elastic deformations due to gravity loading, J. Mech. Phys. Solids, 136, 103702, https://doi.org/10.1016/j.jmps.2019.103702, 2020.
Ahmad, H., Sehgal, S., Mishra, A., and Gupta, R.: Mimosa pudica L. (Laajvanti): An overview, Pharmacogn Rev., 6, 115, https://doi.org/10.4103/0973-7847.99945, 2012.
Ahmed, E. M.: Hydrogel: Preparation, characterization, and applications: A review, J. Adv. Res., 6, 105–121, https://doi.org/10.1016/j.jare.2013.07.006, 2015.
Aishan, Y., Funano, S.-I., Sato, A., Ito, Y., Ota, N., Yalikun, Y., and Tanaka, Y.: Bio-actuated microvalve in microfluidics using sensing and actuating function of mimosa pudica, Sci. Rep., 12, 7653, https://doi.org/10.1038/s41598-022-11637-3, 2022.
Ameduri, S. and Concilio, A.: Morphing wings review: Aims, challenges, and current open issues of a technology, Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci., 237, 4112–4130, https://doi.org/10.1177/0954406220944423, 2023.
Andersen, M. C.: Diaspore morphology and seed dispersal in several wind–dispersed asteraceae, Am. J. Bot., 80, 487–492, https://doi.org/10.1002/j.1537-2197.1993.tb13830.x, 1993.
Armon, S., Efrati, E., Kupferman, R., and Sharon, E.: Geometry and mechanics in the opening of chiral seed pods, Science, 333, 1726–1730, https://doi.org/10.1126/science.1203874, 2011.
Atamian, H. S., Creux, N. M., Brown, R. I., Garner, A. G., Blackman, B. K., and Harmer, S. L.: Circadian regulation of sunflower heliotropism, floral orientation, and pollinator visits, Science, 353, 587–590, https://doi.org/10.1126/science.aaf9793, 2016.
Athas, J. C., Nguyen, C. P., Zarket, B. C., Gargava, A., Nie, Z., and Raghavan, S. R.: Enzyme-triggered folding of hydrogels: Toward a mimic of the venus flytrap, ACS Appl. Mater. Interfaces, 8, 19066–19074, https://doi.org/10.1021/acsami.6b05024, 2016.
Azuma, A.: Flight of seeds, flying fish, squid, mammals, amphibians and reptiles, in: Flow Phenomena in Nature–Volume 1: A Challenge to Engineering Design, edited by: Liebe, R., WIT Press, Southampton, UK, 88–103, ISBN 978-1-84564-001-9, 2007.
Bai, S., He, Q., and Chirarattananon, P.: A bioinspired revolving-wing drone with passive attitude stability and efficient hovering flight, Sci. Robot., 7, eabg5913, https://doi.org/10.1126/scirobotics.abg5913, 2022.
Bar-On, Y. M., Phillips, R., and Milo, R.: The biomass distribution on earth, P. Natl. Acad. Sci. USA, 115, 6506–6511, https://doi.org/10.1073/pnas.1711842115, 2018.
Bastola, A. K., Rodriguez, N., Behl, M., Soffiatti, P., Rowe, N. P., and Lendlein, A.: Cactus-inspired design principles for soft robotics based on 3d printed hydrogel-elastomer systems, Mater. Des., 202, 109515, https://doi.org/10.1016/j.matdes.2021.109515, 2021.
Bauer, U., Paulin, M., Robert, D., and Sutton, G. P.: Mechanism for rapid passive-dynamic prey capture in a pitcher plant, P. Natl. Acad. Sci. USA, 112, 13384–13389, https://doi.org/10.1073/pnas.1510060112, 2015.
Berthet-Rayne, P., Sadati, S. H., Petrou, G., Patel, N., Giannarou, S., Leff, D. R., and Bergeles, C.: Mammobot: A miniature steerable soft growing robot for early breast cancer detection, IEEE Robot. Autom. Lett., 6, 5056–5063, https://doi.org/10.1109/LRA.2021.3068676, 2021.
Bianchi, G., Agoni, A., and Cinquemani, S.: A bioinspired robot growing like plant roots, J. Bionic. Eng., 20, 2044–2058, https://doi.org/10.1007/s42235-023-00369-3, 2023.
Birnbaum, K. D. and Alvarado, A. S.: Slicing across kingdoms: Regeneration in plants and animals, Cell, 132, 697–710, https://doi.org/10.1016/j.cell.2008.01.040, 2008.
Blumenschein, L. H., Coad, M. M., Haggerty, D. A., Okamura, A. M., and Hawkes, E. W.: Design, modeling, control, and application of everting vine robots, Front. Robot. AI, 7, https://doi.org/10.3389/frobt.2020.548266, 2020.
Bolnick, D. I., Barrett, R. D., Oke, K. B., Rennison, D. J., Stuart, Y. E., and Futuyma, D.: Annual review of ecology, evolution, and systematics, Annu. Rev., 49, 303–330, https://doi.org/10.1146/annurev-ecolsys-110617-062240, 2018.
Braam, J.: In touch: Plant responses to mechanical stimuli, New Phytol., 165, 373–389, https://doi.org/10.1111/j.1469-8137.2004.01263.x, 2005.
Burri, J. T., Saikia, E., Läubli, N. F., Vogler, H., Wittel, F. K., Rüggeberg, M., Herrmann, H. J., Burgert, I., Nelson, B. J., and Grossniklaus, U.: A single touch can provide sufficient mechanical stimulation to trigger venus flytrap closure, PLOS Biol., 18, e3000740, https://doi.org/10.1371/journal.pbio.3000740, 2020.
Cavalier-Smith, T.: A revised six-kingdom system of life, Biol. Rev., 73, 203–266, https://doi.org/10.1017/s0006323198005167, 1998.
Chapin III, F. S., Matson, P. A., and Vitousek, P.: Principles of terrestrial ecosystem ecology, Springer New York, New York, USA, https://doi.org/10.1007/b97397, 2011.
Cecchini, L., Mariani, S., Ronzan, M., Mondini, A., Pugno, N. M., and Mazzolai, B.: 4D printing of humidity-driven seed inspired soft robots, Adv. Sci., 10, 2205146, https://doi.org/10.1002/advs.202205146, 2023.
Cezan, S. D., Baytekin, H. T., and Baytekin, B.: Self-regulating plant robots: Bioinspired heliotropism and nyctinasty, Soft Robot., 7, 444–450, https://doi.org/10.1089/soro.2019.0036, 2020.
Chen, G., Gou, Y., and Zhang, A.: Synthesis of compliant multistable mechanisms through use of a single bistable mechanism, J. Mech. Des., 133, 081007, https://doi.org/10.1115/1.4004543, 2011.
Chen, G., Ma, B., Chen, Y., Chen, Y., Zhang, J., and Liu, H.: Soft robots with plant-inspired gravitropism based on fluidic liquid metal, Adv. Sci., 11, 2306129, https://doi.org/10.1002/advs.202306129, 2024.
Chen, H., Zhang, P., Zhang, L., Liu, H., Jiang, Y., Zhang, D., Han, Z., and Jiang, L.: Continuous directional water transport on the peristome surface of nepenthes alata, Nature, 532, 85–89, https://doi.org/10.1038/nature17189, 2016.
Chen, H., Ran, T., Gan, Y., Zhou, J., Zhang, Y., Zhang, L., Zhang, D., and Jiang, L.: Ultrafast water harvesting and transport in hierarchical microchannels, Nat. Mater., 17, 935–942, https://doi.org/10.1038/s41563-018-0171-9, 2018.
Chen, Y., Valenzuela, C., Zhang, X., Yang, X., Wang, L., and Feng, W.: Light-driven dandelion-inspired microfliers, Nat. Commun., 14, 3036, https://doi.org/10.1038/s41467-023-38792-z, 2023a.
Chen, Y., Jiao, Z., Jiao, S., Quan, Z., Zhang, C., Li, B., Niu, S., Han, Z., and Ren, L.: Bio-inspired anti-glare and self-cleaning surface for optical/tissue residue pollution treatment of medical device surface, Chem. Eng. J., 506, 160041, https://doi.org/10.1016/j.cej.2025.160041, 2025a.
Chen, Z., Wang, H., Cao, Y., Chen, Y., Akkus, O., Liu, H., and Cao, C.: Bio-inspired anisotropic hydrogels and their applications in soft actuators and robots, Matter, 6, 3803–3837, https://doi.org/10.1016/j.matt.2023.08.011, 2023b.
Chen, Z., Chen, J., Jung, S., Kim, H.-Y., Preti, M. L., Laschi, C., Ren, Z., Sitti, M., Full, R. J., and Yang, G.-Z.: Bioinspired and biohybrid soft robots: Principles and emerging technologies, Matter, 8, 102045, https://doi.org/10.1016/j.matt.2025.102045, 2025b.
Cheng, T., Thielen, M., Poppinga, S., Tahouni, Y., Wood, D., Steinberg, T., Menges, A., and Speck, T.: Bio-inspired motion mechanisms: Computational design and material programming of self-adjusting 4d-printed wearable systems, Adv. Sci., 8, 2100411, https://doi.org/10.1002/advs.202100411, 2021.
Cikalleshi, K., Nexha, A., Kister, T., Ronzan, M., Mondini, A., Mariani, S., Kraus, T., and Mazzolai, B.: A printed luminescent flier inspired by plant seeds for eco-friendly physical sensing, Sci. Adv., 9, eadi8492, https://doi.org/10.1126/sciadv.adi8492, 2023.
Coad, M. M., Blumenschein, L. H., Cutler, S., Zepeda, J. A. R., Naclerio, N. D., El-Hussieny, H., Mehmood, U., Ryu, J. H., Hawkes, E. W., and Okamura, A. M.: Vine robots, IEEE Robot. Autom. Mag., 27, 120–132, https://doi.org/10.1109/MRA.2019.2947538, 2020.
Cosgrove, D. J.: Growth of the plant cell wall, Nat. Rev. Mol. Cell Biol., 6, 850–861, https://doi.org/10.1038/nrm1746, 2005.
Cullen, E. and Hay, A.: Creating an explosion: Form and function in explosive fruit, Curr. Opin. Plant Biol., 79, 102543, https://doi.org/10.1016/j.pbi.2024.102543, 2024.
Cummins, C., Seale, M., Macente, A., Certini, D., Mastropaolo, E., Viola, I. M., and Nakayama, N.: A separated vortex ring underlies the flight of the dandelion, Nature, 562, 414–418, https://doi.org/10.1038/s41586-018-0604-2, 2018.
Darwin, C.: The movements and habits of climbing plants, Cambridge University Press, UK, ISBN 9781108003599, 1875a.
Darwin, C.: Insectivorous plants, John Murray, London, UK, 1875b.
Del Dottore, E., Mondini, A., Sadeghi, A., Mattoli, V., and Mazzolai, B.: An efficient soil penetration strategy for explorative robots inspired by plant root circumnutation movements, Bioinspiration Biomim., 13, 015003, https://doi.org/10.1088/1748-3190/aa9998, 2018.
Del Dottore, E., Mondini, A., Rowe, N., and Mazzolai, B.: A growing soft robot with climbing plant–inspired adaptive behaviors for navigation in unstructured environments, Sci. Robot., 9, eadi5908, https://doi.org/10.1126/scirobotics.adi5908, 2024.
Dixit, S. and Stefańska, A.: Bio-logic, a review on the biomimetic application in architectural and structural design, Ain Shams Eng. J., 14, 101822, https://doi.org/10.1016/j.asej.2022.101822, 2023.
Do, B. H., Banashek, V., and Okamura, A. M.: Dynamically reconfigurable discrete distributed stiffness for inflated beam robots, in: 2020 IEEE International Conference on Robotics and Automation (ICRA), 31 May-31 August 2020, https://doi.org/10.1109/ICRA40945.2020.9197237, 9050–9056, 2020.
Dorcheh, A. S. and Abbasi, M.: Silica aerogel; synthesis, properties and characterization, J. Mater. Process. Technol., 199, 10–26, https://doi.org/10.1016/j.jmatprotec.2007.10.060, 2008.
Duan, S., Wei, X., Weng, M., Zhao, F., Chen, P., Hong, J., Xiang, S., Shi, Q., Sun, L., Shen, G., and Wu, J.: Venus flytrap-inspired data-center-free fast-responsive soft robots enabled by 2D Ni3(HITP)2 MOF and graphite, Adv. Mater., 36, 2313089, https://doi.org/10.1002/adma.202313089, 2024.
Duanmu, D., Wen, R., Li, X., Huang, W., and Hu, Y.: Development of assistive donning device of robotic hand glove inspired by the venus flytrap, Mech. Based Des. Struct. Mach., 53, 1–15, https://doi.org/10.1080/15397734.2025.2487171, 2025.
Durak, G. M., Thierer, R., Sachse, R., Bischoff, M., Speck, T., and Poppinga, S.: Smooth or with a snap! Biomechanics of trap reopening in the venus flytrap (dionaea muscipula), Adv. Sci., 9, 2201362, https://doi.org/10.1002/advs.202201362, 2022.
Elbaum, R. and Abraham, Y.: Insights into the microstructures of hygroscopic movement in plant seed dispersal, Plant Sci., 223, 124–133, https://doi.org/10.1016/j.plantsci.2014.03.014, 2014.
Elbaum, R., Zaltzman, L., Burgert, I., and Fratzl, P.: The role of wheat awns in the seed dispersal unit, Science, 316, 884–886, https://doi.org/10.1126/science.1140097, 2007.
El-Hussieny, H., Hameed, I. A., and Ryu, J.-H.: Nonlinear model predictive growth control of a class of plant-inspired soft growing robots, IEEE Access, 8, 214495–214503, https://doi.org/10.1109/ACCESS.2020.3041616, 2020.
Esser, F. J., Auth, P., and Speck, T.: Artificial venus flytraps: A research review and outlook on their importance for novel bioinspired materials systems, Front. Robot. AI, 7, 75, https://doi.org/10.3389/frobt.2020.00075, 2020.
Etale, A., Onyianta, A. J., Turner, S. R., and Eichhorn, S. J.: Cellulose: A review of water interactions, applications in composites, and water treatment, Chem. Rev., 123, 2016–2048, https://doi.org/10.1021/acs.chemrev.2c00477, 2023.
Evangelista, D., Hotton, S., and Dumais, J.: The mechanics of explosive dispersal and self-burial in the seeds of the filaree, Erodium cicutarium (Geraniaceae), J. Exp. Biol., 214, 521–529, https://doi.org/10.1242/jeb.050567, 2011.
Farhan, M., Hartstein, D. S., Pieper, Y., Behl, M., Lendlein, A., and Neffe, A. T.: Bio-inspired magnetically controlled reversibly actuating multimaterial fibers, Polymers, 15, 2233, https://doi.org/10.3390/polym15092233, 2023.
Feng, L., Li, S., Li, Y., Zhang, L., Zhai, J., and Song, B.: Super-hydrophobic surfaces: From natural to artificial, Adv. Mater., 14, 1857–1860, https://doi.org/10.1002/adma.200290020, 2002.
Feng, W., He, Q., and Zhang, L.: Embedded physical intelligence in liquid crystalline polymer actuators and robots, Adv. Mater., 37, 2312313, https://doi.org/10.1002/adma.202312313, 2025.
Fenner, M.: Seeds: The ecology of regeneration in plant communities, CABI Publishing, Wallingford, UK, https://doi.org/10.1079/9780851994321.0000, 2000.
Findlay, G. and Findlay, N.: Anatomy and movement of the column in Stylidium, Funct. Plant Biol., 2, 597–621, https://doi.org/10.1071/PP9750597, 1975.
Fiorello, I., Tricinci, O., Naselli, G. A., Mondini, A., Filippeschi, C., Tramacere, F., Mishra, A. K., and Mazzolai, B.: Climbing plant-inspired micropatterned devices for reversible attachment, Adv. Funct. Mater., 30, 2003380, https://doi.org/10.1002/adfm.202003380, 2020.
Fiorello, I., Meder, F., Mondini, A., Sinibaldi, E., Filippeschi, C., Tricinci, O., and Mazzolai, B.: Plant-like hooked miniature machines for on-leaf sensing and delivery, Commun. Mater., 2, 103, https://doi.org/10.1038/s43246-021-00208-0, 2021.
Fiorello, I., Ronzan, M., Speck, T., Sinibaldi, E., and Mazzolai, B.: A biohybrid self-dispersing miniature machine using wild oat fruit awns for reforestation and precision agriculture, Adv. Mater., 36, 2313906, https://doi.org/10.1002/adma.202313906, 2024.
Forterre, Y.: Slow, fast and furious: Understanding the physics of plant movements, J. Exp. Bot., 64, 4745–4760, https://www.jstor.org/stable/24041828 (last access: 20 October 2025), 2013.
Forterre, Y., Skotheim, J. M., Dumais, J., and Mahadevan, L.: How the venus flytrap snaps, Nature, 433, 421–425, https://doi.org/10.1038/nature03185, 2005.
Fu, L., Zhao, W., Ma, J., Yang, M., Liu, X., Zhang, L., and Chen, Y.: A humidity-powered soft robot with fast rolling locomotion, Research, https://doi.org/10.34133/2022/9832901, 2022.
Galstyan, A. and Hay, A.: Snap, crack and pop of explosive fruit, Curr. Opin. Genet. Dev., 51, 31–36, https://doi.org/10.1016/j.gde.2018.04.007, 2018.
Gao, W., Wang, L., Wang, X., and Liu, H.: Magnetic driving flowerlike soft platform: Biomimetic fabrication and external regulation, ACS Appl. Mater. Interfaces, 8, 14182–14189, https://doi.org/10.1021/acsami.6b03218, 2016.
Gao, X., Zhu, D., Fan, S., Rahman, M. Z., Guo, S., and Chen, F.: Structural and mechanical properties of bamboo fiber bundle and fiber/bundle reinforced composites: A review, J. Mater. Res. Technol., 19, 1162–1190, https://doi.org/10.1016/j.jmrt.2022.05.077, 2022.
Geim, A. K. and Novoselov, K. S.: The rise of graphene, Nat. Mater., 6, 183–191, https://doi.org/10.1038/nmat1849, 2007.
Geitmann, A.: Actuators acting without actin, Cell, 166, 15–17, https://doi.org/10.1016/j.cell.2016.06.030, 2016.
Gerbode, S. J., Puzey, J. R., McCormick, A. G., and Mahadevan, L.: How the cucumber tendril coils and overwinds, Science, 337, 1087–1091, https://doi.org/10.1126/science.1223304, 2012.
Gibson, L. J.: The hierarchical structure and mechanics of plant materials, J. R. Soc. Interface, 9, 2749–2766, https://doi.org/10.1098/rsif.2012.0341, 2012.
Godin, C. and Caraglio, Y.: A multiscale model of plant topological structures, J. Theor. Biol., 191, 1–46, https://doi.org/10.1006/jtbi.1997.0561, 1998.
Gong, M., Feng, L., Yang, H., Geng, Z., Weng, T., and Zhang, D.: Venus flytrap-inspired actuator: Recent developments and prospects, Sens. Actuators A Phys., 394, 116920, https://doi.org/10.1016/j.sna.2025.116920, 2025.
Goriely, A. and Tabor, M.: Spontaneous helix hand reversal and tendril perversion in climbing plants, Phys. Rev. Lett., 80, 1564, https://doi.org/10.1103/PhysRevLett.80.1564, 1998.
Greenberg, H. C., Gong, M. L., Magleby, S. P., and Howell, L. L.: Identifying links between origami and compliant mechanisms, Mech. Sci., 2, 217–225, https://doi.org/10.5194/ms-2-217-2011, 2011.
Greene, D. F.: The role of abscission in long-distance seed dispersal by the wind, Ecology, 86, 3105–3110, https://doi.org/10.1890/04-1430, 2005.
Greer, J. D., Morimoto, T. K., Okamura, A. M., and Hawkes, E. W.: A soft, steerable continuum robot that grows via tip extension, Soft Robot., 6, 95–108, https://doi.org/10.1089/soro.2018.0034, 2018.
Greer, J. D., Morimoto, T. K., Okamura, A. M., and Hawkes, E. W.: A soft, steerable continuum robot that grows via tip extension, Soft Robot., 6, 95–108, https://doi.org/10.1089/soro.2018.0034, 2019.
Greer, J. D., Blumenschein, L. H., Alterovitz, R., Hawkes, E. W., and Okamura, A. M.: Robust navigation of a soft growing robot by exploiting contact with the environment, Int. J. Robot. Res., 39, 1724–1738, https://doi.org/10.1177/0278364920903774, 2020.
Griz, L. M. S. and Machado, I. C. S.: Fruiting phenology and seed dispersal syndromes in caatinga, a tropical dry forest in the northeast of brazil, J. Trop. Ecol., 17, 303–321, https://doi.org/10.1017/S0266467401001201, 2001.
Gu, F. and Nielsen, E.: Targeting and regulation of cell wall synthesis during tip growth in plants, J. Integr. Plant Biol., 55, 835–846, https://doi.org/10.1111/jipb.12077, 2013.
Guerrieri, E. and Rasmann, S.: Exposing belowground plant communication, Science, 384, 272–273, https://doi.org/10.1126/science.adk1412, 2024.
Guo, X., Tang, W., Qin, K., Zhong, Y., Xu, H., Qu, Y., Li, Z., Sheng, Q., Gao, Y., and Yang, H.: Powerful uav manipulation via bioinspired self-adaptive soft self-contained gripper, Sci. Adv., 10, eadn6642, https://doi.org/10.1126/sciadv.adn6642, 2024.
Ha, J., Choi, S. M., Shin, B., Lee, M., Jung, W., and Kim, H.-Y.: Hygroresponsive coiling of seed awns and soft actuators, Extreme Mech. Lett., 38, 100746, https://doi.org/10.1016/j.eml.2020.100746, 2020.
Hale, A. N., Imfeld, S. M., Hart, C. E., Gribbins, K. M., Yoder, J. A., and Collier, M. H.: Reduced seed germination after pappus removal in the north american dandelion (Taraxacum officinale; Asteraceae), Weed Sci., 58, 420–425, https://doi.org/10.1614/WS-D-10-00036.1, 2010.
Hausladen, M. M., Zhao, B., Kubala, M. S., Francis, L. F., Kowalewski, T. M., and Ellison, C. J.: Synthetic growth by self-lubricated photopolymerization and extrusion inspired by plants and fungi, P. Natl. Acad. Sci. USA, 119, e2201776119, https://doi.org/10.1073/pnas.2201776119, 2022.
Hawkes, E. W., Blumenschein, L. H., Greer, J. D., and Okamura, A. M.: A soft robot that navigates its environment through growth, Sci. Robot., 2, eaan3028, https://doi.org/10.1126/scirobotics.aan3028, 2017.
Hayashi, M., Feilich, K. L., and Ellerby, D. J.: The mechanics of explosive seed dispersal in orange jewelweed (Impatiens capensis), J. Exp. Bot., 60, 2045–2053, https://doi.org/10.1093/jxb/erp070, 2009.
Hedley, E.: How the natural world is inspiring the robot eyes of the future, Nature, https://doi.org/10.1038/d41586-025-01660-5, 2025.
Hegenauer, V., Fürst, U., Kaiser, B., Smoker, M., Zipfel, C., Felix, G., Stahl, M., and Albert, M.: Detection of the plant parasite Cuscuta reflexa by a tomato cell surface receptor, Science, 353, 478–481, https://doi.org/10.1126/science.aaf3919, 2016.
Higashiyama, T.: Pollen tube navigation can inspire microrobot design, Sci. Robot., 2, eaao1891, https://doi.org/10.1126/scirobotics.aao1891, 2017.
Hinds, T. E., Hawksworth, F. G., and McGinnies, W. J.: Seed discharge in Arceuthobium: A photographic study, Science, 140, 1236–1238, https://doi.org/10.1126/science.140.3572.1236, 1963.
Hong, Y., Zhao, Y., Berman, J., Chi, Y., Li, Y., Huang, H., and Yin, J.: Angle-programmed tendril-like trajectories enable a multifunctional gripper with ultradelicacy, ultrastrength, and ultraprecision, Nat. Commun., 14, 4625, https://doi.org/10.1038/s41467-023-39741-6, 2023.
Howell, L. L.: Compliant mechanisms, in: Encyclopedia of Nanotechnology, Springer, Dordrecht, Netherlands, ISBN047138478X, 2012.
Hyslop, J. and Trowsdale, S.: A review of hydrochory (seed dispersal by water) with implications for riparian rehabilitation, J. Hydrol. N. Z., 51, 137–152, https://www.jstor.org/stable/43945038 (last access: 20 October 2025), 2012.
Iluz, D.: Zoochory: The dispersal of plants by animals, in: All flesh is grass: Plant-animal interrelationships, Springer, https://doi.org/10.1007/978-90-481-9316-5_9, 2010.
Iyer, V., Gaensbauer, H., Daniel, T. L., and Gollakota, S.: Wind dispersal of battery-free wireless devices, Nature, 603, 427–433, https://doi.org/10.1038/s41586-021-04363-9, 2022.
Jalali, S., Aliabadi, M., and Mahdavinejad, M.: Learning from plants: A new framework to approach water-harvesting design concepts, Int. J. Build. Pathol. Adapt., 40, 405–421, https://doi.org/10.1108/IJBPA-01-2021-0007, 2022.
Jeong, S.-G., Kim, J., Son, H., Kim, J. S., Kim, J.-H., Kim, B.-G., and Lee, C.-S.: Fully autonomous water monitoring by plant-inspired robots, J. Hazard. Mater., 479, 135641, https://doi.org/10.1016/j.jhazmat.2024.135641, 2024.
Jiang, Y., Li, Y., Liu, K., Zhang, H., Tong, X., Chen, D., Wang, L., and Paik, J.: Ultra-tunable bistable structures for universal robotic applications, Cell Rep. Phys. Sci., 4, 101365, https://doi.org/10.1016/j.xcrp.2023.101365, 2023.
Johnson, K., Arroyos, V., Ferran, A., Villanueva, R., Yin, D., Elberier, T., Aliseda, A., Fuller, S., Iyer, V., and Gollakota, S.: Solar-powered shape-changing origami microfliers, Sci. Robot., 8, eadg4276, https://doi.org/10.1126/scirobotics.adg4276, 2023.
Joyeux, M.: At the conjunction of biology, chemistry and physics: The fast movements of dionaea, aldrovanda, utricularia and stylidium, Front. Life Sci., 5, 71–79, https://doi.org/10.1080/21553769.2012.708907, 2011.
Kaiser, B., Vogg, G., Fürst, U. B., and Albert, M.: Parasitic plants of the genus cuscuta and their interaction with susceptible and resistant host plants, Front. Plant Sci., 6, 45, https://doi.org/10.3389/fpls.2015.00045, 2015.
Kay, R., Nitièma, K., and Correa, D.: The bio-inspired design of a self-propelling robot driven by changes in humidity, in: Proceedings of the 38th eCAADe Conference, Berlin, Germany, 2, 233–242, ISBN: 978-9-49120-721-1, 2020.
Kayahan, N.: Assessment of some physical and mechanical properties of Ecballium Elaterium (L.) seeds grown in natural environment, Int. J. Life Sci. Agric. Res., 100, 3, https://doi.org/10.55677/ijlsar/V03I6Y2024-08, 2024.
Kayser, M., Cai, L., Falcone, S., Bader, C., Inglessis, N., Darweesh, B., and Oxman, N.: Fiberbots: An autonomous swarm-based robotic system for digital fabrication of fiber-based composites, Constr. Robot., 2, 67–79, https://doi.org/10.1007/s41693-018-0013-y, 2018.
Kelly, L. T., Giljohann, K. M., Duane, A., Aquilué, N., Archibald, S., Batllori, E., Bennett, A. F., Buckland, S. T., Canelles, Q., and Clarke, M. F.: Fire and biodiversity in the anthropocene, Science, 370, eabb0355, https://doi.org/10.1126/science.abb0355, 2020.
Khalil, A. S. and Collins, J. J.: Synthetic biology: Applications come of age, Nat. Rev. Genet., 11, 367–379, https://doi.org/10.1038/nrg2775, 2010.
Khuller, A. R., Christensen, P. R., Harrison, T. N., and Diniega, S.: The distribution of frosts on mars: Links to present-day gully activity, J. Geophys. Res.-Planets, 126, e2020JE006577, https://doi.org/10.1029/2020JE006577, 2021.
Kim, B. H., Li, K., Kim, J.-T., Park, Y., Jang, H., Wang, X., Xie, Z., Won, S. M., Yoon, H.-J., and Lee, G.: Three-dimensional electronic microfliers inspired by wind-dispersed seeds, Nature, 597, 503–510, https://doi.org/10.1038/s41586-021-03847-y, 2021.
Kim, J.-T., Yoon, H.-J., Cheng, S., Liu, F., Kang, S., Paudel, S., Cho, D., Luan, H., Lee, M., and Jeong, G.: Functional bio-inspired hybrid fliers with separated ring and leading edge vortices, PNAS nexus, 3, pgae110, https://doi.org/10.1093/pnasnexus/pgae110, 2024.
Kim, S.-W., Koh, J.-S., Cho, M., and Cho, K.-J.: Design & analysis a flytrap robot using bi-stable composite, in: 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011, https://doi.org/10.1109/TRO.2012.2198510, 215–220, 2011.
Kim, S.-W., Koh, J.-S., Lee, J.-G., Ryu, J., Cho, M., and Cho, K.-J.: Flytrap-inspired robot using structurally integrated actuation based on bistability and a developable surface, Bioinspir. Biomim., 9, 036004, https://doi.org/10.1088/1748-3182/9/3/036004, 2014.
Klimm, F., Thielen, M., Homburger, J., Modert, M., and Speck, T.: Natural coil springs: Biomechanics and morphology of the coiled tendrils of the climbing passion flower passiflora discophora, Acta Biomater., 189, 478–490, https://doi.org/10.1016/j.actbio.2024.10.002, 2024.
Knospler, J., Pagliocca, N., Xue, W., and Trkov, M.: Tendrilbot: Modular soft robot with versatile radial grasping and locomotion capabilities, Sens. Actuators A Phys., 378, 115835, https://doi.org/10.1016/j.sna.2024.115835, 2024.
Koch, K., Bhushan, B., and Barthlott, W.: Multifunctional surface structures of plants: An inspiration for biomimetics, Prog. Mater. Sci., 54, 137–178, https://doi.org/10.1016/j.pmatsci.2008.07.003, 2009.
Kretschmann, D.: Mechanical properties of wood, in: Wood handbook: Wood as an engineering material, US Dept. of Agriculture, Forest Service, Forest Products Laboratory, Madison, WI, USA, https://doi.org/10.2737/FPL-GTR-190, 5.1–5.46, 2010.
Kübler, A. M., du Pasquier, C., Low, A., Djambazi, B., Aymon, N., Förster, J., Agharese, N., Siegwart, R., and Okamura, A. M.: A comparison of pneumatic actuators for soft growing vine robots, Soft Robot., 11, 857–868, https://doi.org/10.1089/soro.2023.0169, 2024.
Lapotre, M. G., Ewing, R. C., Lamb, M., Fischer, W., Grotzinger, J., Rubin, D. M., Lewis, K., Ballard, M., Day, M., and Gupta, S.: Large wind ripples on mars: A record of atmospheric evolution, Science, 353, 55–58, https://doi.org/10.1126/science.aaf3206, 2016.
Le, Q., Bu, J., Qu, Y., Zhu, B., and Du, T.: Computational biomimetics of winged seeds, ACM Trans. Graph., 43, 1–13, https://doi.org/10.1145/3687899, 2024.
Lee, Y. W., Kim, J. K., Bozuyuk, U., Dogan, N. O., Khan, M. T. A., Shiva, A., Wild, A. M., and Sitti, M.: Multifunctional 3d-printed pollen grain-inspired hydrogel microrobots for on-demand anchoring and cargo delivery, Adv. Mater., 35, 2209812, https://doi.org/10.1002/adma.202209812, 2023.
Leighton, R. B. and Murray, B. C.: Behavior of carbon dioxide and other volatiles on mars, Science, 153, 136–144, https://doi.org/10.1126/science.153.3732.136, 1966.
Leovy, C.: Weather and climate on mars, Nature, 412, 245–249, https://doi.org/10.1038/35084192, 2001.
Li, J., Yan, J., Huang, M., and Wang, Y.: Design and feasibility tests of a gas-driven bionic flytrap soft robot, Research Square [Preprint], https://doi.org/10.21203/rs.3.rs-1113013/v1, 8 December 2021a.
Li, J., Tian, A., Sun, Y., Feng, B., Wang, H., and Zhang, X.: The development of a venus flytrap inspired soft robot driven by IPMC, J. Bionic. Eng., 20, 406–415, https://doi.org/10.1007/s42235-022-00250-9, 2023a.
Li, L., Wei, J., Zhang, J., Li, B., Yang, Y., and Zhang, J.: Challenges and strategies for commercialization and widespread practical applications of superhydrophobic surfaces, Sci. Adv., 9, eadj1554, https://doi.org/10.1126/sciadv.adj1554, 2023b.
Li, P., Zhang, Y., Zhang, G., Zhou, D., and Li, L.: A bioinspired soft robot combining the growth adaptability of vine plants with a coordinated control system, Research, 2021, https://doi.org/10.34133/2021/9843859, 2021b.
Li, S., Zhang, Y., and Liu, J.: Seed ejection mechanism in an oxalis species, Sci. Rep., 10, 8855, https://doi.org/10.1038/s41598-020-65885-2, 2020.
Li, W., Lou, C., Liu, S., Ma, Q., Liao, G., Leung, K. C. F., Gong, X., Ma, H., and Xuan, S.: Climbing plant-inspired multi-responsive biomimetic actuator with transitioning complex surfaces, Adv. Funct. Mater., 35, 2414733, https://doi.org/10.1002/adfm.202414733, 2025.
Liang, H., Hao, G., and Olszewski, O. Z.: A review on vibration-based piezoelectric energy harvesting from the aspect of compliant mechanisms, Sens. Actuators A Phys., 331, 112743, https://doi.org/10.1016/j.sna.2021.112743, 2021.
Liang, H., Hao, G., Olszewski, O. Z., and Pakrashi, V.: Ultra-low wide bandwidth vibrational energy harvesting using a statically balanced compliant mechanism, Int. J. Mech. Sci., 219, 107130, https://doi.org/10.1016/j.ijmecsci.2022.107130, 2022.
Liang, H., Yang, Z., Zhang, L., Luo, B., Liu, H., Li, L., Hopkins, J. B., and Hao, G.: The design of spatial compliant mechanisms with distributed multi-stability based on post-buckled cylindrical compliant beams, Mech. Syst. Signal Process., 228, 112365, https://doi.org/10.1016/j.ymssp.2025.112365, 2025.
Lim, H., Park, T., Na, J., Park, C., Kim, B., and Kim, E.: Construction of a photothermal venus flytrap from conductive polymer bimorphs, NPG Asia Mater., 9, e399–e399, https://doi.org/10.1038/am.2017.101, 2017.
Lin, Y., Zhang, C., Tang, W., Jiao, Z., Wang, J., Wang, W., Zhong, Y., Zhu, P., Hu, Y., and Yang, H.: A bioinspired stress-response strategy for high-speed soft grippers, Adv. Sci., 8, 2102539, https://doi.org/10.1002/advs.202102539, 2021.
Lindtner, T., Uzan, A. Y., Eder, M., Bar-On, B., and Elbaum, R.: Repetitive hygroscopic snapping movements in awns of wild oats, Acta Biomater., 135, 483–492, https://doi.org/10.1016/j.actbio.2021.08.048, 2021.
Liu, C., Zeng, L., Li, J., and Shao, X.: Effects of wings number on the flight performance of autorotating seeds, Phys. Fluids, 37, https://doi.org/10.1063/5.0244050, 2025.
Liu, J., Zhang, Y., Jiang, Y., Sun, H., Duan, R., Qu, J., Yao, D., Liu, S., and Guan, S.: Formation mechanism and occurrence law of pod shattering in soybean: A review, Phyton, 91, 1327, https://doi.org/10.32604/phyton.2022.019870, 2022a.
Liu, J., Zhao, P., Chen, K., Zhang, X., and Zhang, X.: 1U-sized deployable space manipulator for future on-orbit servicing, assembly, and manufacturing, Space Sci. Technol., 2022, https://doi.org/10.34133/2022/9894604, 2022b.
Liu, L., Wang, W., Ju, X.-J., Xie, R., and Chu, L.-Y.: Smart thermo-triggered squirting capsules for nanoparticle delivery, Soft Matter, 6, 3759–3763, https://doi.org/10.1039/C002231D, 2010.
Lucarotti, C., Totaro, M., Sadeghi, A., Mazzolai, B., and Beccai, L.: Revealing bending and force in a soft body through a plant root inspired approach, Sci. Rep., 5, 1–10, https://doi.org/10.1038/srep08788, 2015.
Luo, D., Gu, J., Qin, F., Wang, G., and Yao, L.: E-seed: Shape-changing interfaces that self drill, in: Proceedings of the 33rd Annual ACM Symposium on User Interface Software and Technology, https://doi.org/10.1145/3379337.3415855, 45–57, 2020.
Luo, D., Maheshwari, A., Danielescu, A., Li, J., Yang, Y., Tao, Y., Sun, L., Patel, D. K., Wang, G., and Yang, S.: Autonomous self-burying seed carriers for aerial seeding, Nature, 614, 463–470, https://doi.org/10.1038/s41586-022-05656-3, 2023.
Luong, J., Glick, P., Ong, A., DeVries, M. S., Sandin, S., Hawkes, E. W., and Tolley, M. T.: Eversion and retraction of a soft robot towards the exploration of coral reefs, in: 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019, https://doi.org/10.1109/ROBOSOFT.2019.8722730, 801–807, 2019.
Lv, J., Song, Y., Jiang, L., and Wang, J.: Bio-inspired strategies for anti-icing, ACS nano, 8, 3152–3169, https://doi.org/10.1021/nn406522n, 2014.
Ma, Z., Song, K., Ju, J., Wang, Y., Jia, H., and Zhou, X.: Design and analysis of the thick-wall cylindrical origami metamaterials based on tessellation principles, Compos. Struct., 366, 119182, https://doi.org/10.1016/j.compstruct.2025.119182, 2025.
Mader, A., Langer, M., Knippers, J., and Speck, O.: Learning from plant movements triggered by bulliform cells: The biomimetic cellular actuator, J. R. Soc. Interface, 17, 20200358, https://doi.org/10.1098/rsif.2020.0358, 2020.
Mandelbrot, B. B.: The fractal geometry of nature/revised and enlarged edition, W. H. Freeman, New York, San Francisco, USA, ISBN0716711869, 1983.
Mao, L., Yang, P., Tian, C., Shen, X., Wang, F., Zhang, H., Meng, X., and Xie, H.: Magnetic steering continuum robot for transluminal procedures with programmable shape and functionalities, Nat. Commun., 15, 3759, https://doi.org/10.1038/s41467-024-48058-x, 2024.
Mariani, S., Cikalleshi, K., Ronzan, M., Filippeschi, C., Naselli, G. A., and Mazzolai, B.: A biodegradable, porous flier inspired by a parachute-like tragopogon fruit for environmental preservation, Small, 21, 2403582, https://doi.org/10.1002/smll.202403582, 2024.
Maric, T., Nasir, M. Z. M., Rosli, N. F., Budanović, M., Webster, R. D., Cho, N. J., and Pumera, M.: Microrobots derived from variety plant pollen grains for efficient environmental clean up and as an anti-cancer drug carrier, Adv. Funct. Mater., 30, 2000112, https://doi.org/10.1002/adfm.202000112, 2020.
Mathiasen, R. L., Nickrent, D. L., Shaw, D. C., and Watson, D. M.: Mistletoes: Pathology, systematics, ecology, and management, Plant Dis., 92, 988–1006, https://doi.org/10.1094/PDIS-92-7-0988, 2008.
Maur, P. A. d., Djambazi, B., Haberthür, Y., Hörmann, P., Kübler, A., Lustenberger, M., Sigrist, S., Vigen, O., Förster, J., Achermann, F., Hampp, E., Katzschmann, R. K., and Siegwart, R.: Roboa: Construction and evaluation of a steerable vine robot for search and rescue applications, in: 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 12–16 April 2021, https://doi.org/10.1109/RoboSoft51838.2021.9479192, 15–20, 2021.
Mazzolai, B.: Plant-inspired growing robots, in: Soft robotics: Trends, applications and challenges, Proceedings of the soft robotics week, Livorno, Italy, 25–30 April 2016, Springer, Cham, 57–36, https://doi.org/10.1007/978-3-319-46460-2, 2016.
Mazzolai, B., Tramacere, F., Fiorello, I., and Margheri, L.: The bio-engineering approach for plant investigations and growing robots. A mini-review, Front. Robot. AI, 7–2020, https://doi.org/10.3389/frobt.2020.573014, 2020.
Mazzolai, B., Mariani, S., Ronzan, M., Cecchini, L., Fiorello, I., Cikalleshi, K., and Margheri, L.: Morphological computation in plant seeds for a new generation of self-burial and flying soft robots, Front. Robot. AI, 8, 797556, https://doi.org/10.3389/frobt.2021.797556, 2021.
Meder, F., Babu, S. P. M., and Mazzolai, B.: A plant tendril-like soft robot that grasps and anchors by exploiting its material arrangement, IEEE Robot. Autom. Lett., 7, 5191–5197, https://doi.org/10.1109/LRA.2022.3153713, 2022.
Meng, Q., Wang, Q., Liu, H., and Jiang, L.: A bio-inspired flexible fiber array with an open radial geometry for highly efficient liquid transfer, NPG Asia Mater., 6, e125-e125, https://doi.org/10.1038/am.2014.70, 2014.
Minami, S. and Azuma, A.: Various flying modes of wind-dispersal seeds, J. Theor. Biol., 225, 1–14, https://doi.org/10.1016/S0022-5193(03)00216-9, 2003.
Minorsky, P. V.: The functions of foliar nyctinasty: A review and hypothesis, Biol. Rev., 94, 216–229, https://doi.org/10.1111/brv.12444, 2019.
Miranda, V. F., Silva, S. R., Reut, M. S., Dolsan, H., Stolarczyk, P., Rutishauser, R., and Płachno, B. J.: A historical perspective of bladderworts (utricularia): Traps, carnivory and body architecture, Plants, 10, 2656, https://doi.org/10.3390/plants10122656, 2021.
Mithöfer, A.: Carnivorous plants and their biotic interactions, J. Plant Interact., 17, 333–343, https://doi.org/10.1080/17429145.2022.2038710, 2022.
Mundargi, R. C., Potroz, M. G., Park, S., Shirahama, H., Lee, J. H., Seo, J., and Cho, N.-J.: Natural sunflower pollen as a drug delivery vehicle, Small, 12, 1167–1173, https://doi.org/10.1002/smll.201500860, 2015.
Murakami, K., Sato, M., Kubota, M., and Shintake, J.: Plant robots: Harnessing growth actuation of plants for locomotion and object manipulation, Adv. Sci., 11, 2405549, https://doi.org/10.1002/advs.202405549, 2024.
Muraoka, Y. and Ueda, M.: Nyctinasty, Current Biology, 34, R307–R308, https://doi.org/10.1016/j.cub.2024.02.047, 2024.
Must, I., Sinibaldi, E., and Mazzolai, B.: A variable-stiffness tendril-like soft robot based on reversible osmotic actuation, Nat. Commun., 10, 344, https://doi.org/10.1038/s41467-018-08173-y, 2019.
Naclerio, N. D., Karsai, A., Murray-Cooper, M., Ozkan-Aydin, Y., Aydin, E., Goldman, D. I., and Hawkes, E. W.: Controlling subterranean forces enables a fast, steerable, burrowing soft robot, Sci. Robot., 6, eabe2922, https://doi.org/10.1126/scirobotics.abe2922, 2021.
Naglich, A. and LeDuc, P.: Plant movement response to environmental mechanical stimulation toward understanding predator defense, Adv. Sci., 11, 2404578, https://doi.org/10.1002/advs.202404578, 2024.
Naselli, G. A., Scharff, R. B., Thielen, M., Visentin, F., Speck, T., and Mazzolai, B.: A soft continuum robotic arm with a climbing plant-inspired adaptive behavior for minimal sensing, actuation, and control effort, Adv. Intell. Syst., 6, 2300537, https://doi.org/10.1002/aisy.202300537, 2024.
Nathan, R., Katul, G. G., Bohrer, G., Kuparinen, A., Soons, M. B., Thompson, S. E., Trakhtenbrot, A., and Horn, H. S.: Mechanistic models of seed dispersal by wind, Theor. Ecol., 4, 113–132, https://doi.org/10.1007/s12080-011-0115-3, 2011.
Netto, A. G., Christoffoleti, P., VanGessel, M., Carvalho, S. J. P., Nicolai, M., and Brunharo, C.: Seed production, dissemination, and weed seedbanks, in: Persistence strategies of weeds, John Wiley & Sons Ltd., https://doi.org/10.1002/9781119525622.ch2, 2022.
Nexha, A., Mariani, S., Cikalleshi, K., Kister, T., Mazzolai, B., and Kraus, T.: Sensing relative humidity with a fluorescent seed-like biodegradable flier, Nanoscale, 17, 18143–18152, https://doi.org/10.1039/D5NR01318F, 2025.
Nietzel, T., Mostertz, J., Ruberti, C., Née, G., Fuchs, P., Wagner, S., Moseler, A., Müller-Schüssele, S. J., Benamar, A., and Poschet, G.: Redox-mediated kick-start of mitochondrial energy metabolism drives resource-efficient seed germination, P. Natl. Acad. Sci. USA, 117, 741–751, https://doi.org/10.1073/pnas.1910501117, 2020.
Niklas, K. J.: Plant biomechanics: An engineering approach to plant form and function, University of Chicago Press, Chicago, USA, ISBN9780226586410, 1992.
Niwa, H.: Estimation of potential seed dispersal regions based on floating and ballochory of euphorbia adenochlora capsules, Ecol. Solut. Evid., 5, e70000, https://doi.org/10.1002/2688-8319.70000, 2024.
Ochola, J., Coyne, D., Cortada, L., Haukeland, S., Ng'ang'a, M., Hassanali, A., Opperman, C., and Torto, B.: Cyst nematode bio-communication with plants: Implications for novel management approaches, Pest Manag. Sci., 77, 1150–1159, https://doi.org/10.1002/ps.6105, 2021.
Oh, Y. S. and Kota, S.: Synthesis of multistable equilibrium compliant mechanisms using combinations of bistable mechanisms, J. Mech. Des., 131, 021002, https://doi.org/10.1115/1.3013316, 2009.
Pan, C. H., Lin, C. H., and Pan, H.-Y.: Development of novel actuating mechanisms for smart artificial flowers, in: Proceedings of the 4th World Congress on Mechanical, Chemical, and Material Engineering, Madrid, Spain, 16–18 August 2018, https://doi.org/10.11159/icmie18.116, 2018.
Pan, Y., Lee, L. H., Yang, Z., Hassan, S. U., and Shum, H. C.: Co-doping optimized hydrogel-elastomer micro-actuators for versatile biomimetic motions, Nanoscale, 13, 18967–18976, https://doi.org/10.1039/D1NR05757J, 2021.
Pan, Z., Pitt, W. G., Zhang, Y., Wu, N., Tao, Y., and Truscott, T. T.: The upside-down water collection system of Syntrichia caninervis, Nat. Plants, 2, 1–5, https://doi.org/10.1038/nplants.2016.76, 2016.
Park, C. S., Kang, Y.-W., Na, H., and Sun, J.-Y.: Hydrogels for bioinspired soft robots, Prog. Polym. Sci., 150, 101791, https://doi.org/10.1016/j.progpolymsci.2024.101791, 2024.
Peeketi, A. R., Sol, J. A., Swaminathan, N., Schenning, A. P., Debije, M. G., and Annabattula, R. K.: Calla lily flower inspired morphing of flat films to conical tubes, J. Polym. Sci., 61, 1065–1073, https://doi.org/10.1002/pol.20220492, 2023.
Pérez-Antón, M., Schneider, I., Kroll, P., Hofhuis, H., Metzger, S., Pauly, M., and Hay, A.: Explosive seed dispersal depends on spl7 to ensure sufficient copper for localized lignin deposition via laccases, P. Natl. Acad. Sci. USA, 119, e2202287119, https://doi.org/10.1073/pnas.2202287119, 2022.
Pimpale, P., Merlin, E., Adwaith, P., and Soni, K.: Natural nano-systems and their biomimetic applications: A comprehensive review, J. Adv. Biol. Biotechnol., 28, 553–563, https://doi.org/10.9734/jabb/2025/v28i52318, 2025.
Poppinga, S. and Joyeux, M.: Different mechanics of snap-trapping in the two closely related carnivorous plants Dionaea muscipula and Aldrovanda vesiculosa, Phys. Rev. E, 84, 041928, https://doi.org/10.1103/PhysRevE.84.041928, 2011.
Poppinga, S., Körner, A., Sachse, R., Born, L., Westermeier, A., Hesse, L., Knippers, J., Bischoff, M., Gresser, G. T., and Speck, T.: Compliant mechanisms in plants and architecture, in: Biomimetic research for architecture and building construction, Springer, Cham, Switerland, https://doi.org/10.1007/978-3-319-46374-2, 2016.
Poppinga, S., Böse, A.-S., Seidel, R., Hesse, L., Leupold, J., Caliaro, S., and Speck, T.: A seed flying like a bullet: Ballistic seed dispersal in chinese witch-hazel (Hamamelis mollis OLIV., Hamamelidaceae), J. R. Soc. Interface, 16, 20190327, https://doi.org/10.1098/rsif.2019.0327, 2019.
Poppinga, S., Correa, D., Bruchmann, B., Menges, A., and Speck, T.: Plant movements as concept generators for the development of biomimetic compliant mechanisms, Integr. Comp. Biol., 60, 886–895, https://doi.org/10.1093/icb/icaa028, 2020.
Qing, H., Chi, Y., Hong, Y., Zhao, Y., Qi, F., Li, Y., and Yin, J.: Fully 3d-printed miniature soft hydraulic actuators with shape memory effect for morphing and manipulation, Adv. Mater., 36, 2402517, https://doi.org/10.1002/adma.202402517, 2024.
Qing, H., Zhou, C., Qi, F., and Yin, J.: Programmable seconds-to-days-long delayed snapping in jumping metashells, P. Natl. Acad. Sci. USA, 122, e2503313122, https://doi.org/10.1073/pnas.2503313122, 2025.
Rabaux, O. and Jérôme, C.: Bioinspired morphing mechanisms for soft systems: A review, Adv. Intell. Syst., 7, 2400331, https://doi.org/10.1002/aisy.202400331, 2025.
Rafsanjani, A., Brulé, V., Western, T. L., and Pasini, D.: Hydro-responsive curling of the resurrection plant Selaginella lepidophylla, Sci. Rep., 5, 8064, https://doi.org/10.1038/srep08064, 2015.
Raja, V., Silva, P. L., Holghoomi, R., and Calvo, P.: The dynamics of plant nutation, Sci. Rep., 10, 19465, https://doi.org/10.1038/s41598-020-76588-z, 2020.
Ren, L., Li, B., Wang, K., Zhou, X., Song, Z., Ren, L., and Liu, Q.: Plant-morphing strategies and plant-inspired soft actuators fabricated by biomimetic four-dimensional printing: A review, Front. Mater., 8, 651521, https://doi.org/10.3389/fmats.2021.651521, 2021.
Ronzan, M., Mariani, S., Cecchini, L., Filippeschi, C., Dante, S., Pugno, N. M., and Mazzolai, B.: Structural and mechanical properties of humidity-responsive geraniaceae awns, Sci. Rep., 15, 21289, https://doi.org/10.1038/s41598-025-09186-6, 2025.
Sachse, R., Westermeier, A., Mylo, M., Nadasdi, J., Bischoff, M., Speck, T., and Poppinga, S.: Snapping mechanics of the venus flytrap (Dionaea muscipula), P. Natl. Acad. Sci. USA, 117, 16035–16042, https://doi.org/10.1073/pnas.2002707117, 2020.
Sadeghi, A., Mondini, A., Del Dottore, E., Mattoli, V., Beccai, L., Taccola, S., Lucarotti, C., Totaro, M., and Mazzolai, B.: A plant-inspired robot with soft differential bending capabilities, Bioinspir. Biomim., 12, 015001, https://doi.org/10.1088/1748-3190/12/1/015001, 2016.
Sadeghi, A., Mondini, A., and Mazzolai, B.: Toward self-growing soft robots inspired by plant roots and based on additive manufacturing technologies, Soft Robot., 4, 211–223, https://doi.org/10.1089/soro.2016.0080, 2017.
Sagan, C. and Mullen, G.: Earth and mars: Evolution of atmospheres and surface temperatures, Science, 177, 52–56, https://doi.org/10.1126/science.177.4043.52, 1972.
Segundo-Ortin, M. and Calvo, P.: Consciousness and cognition in plants, WIREs Cogn. Sci., 13, e1578, https://doi.org/10.1002/wcs.1578, 2022.
Shahinpoor, M.: Biomimetic robotic venus flytrap (Dionaea muscipula Ellis) made with ionic polymer metal composites, Bioinspir. Biomim., 6, 046004, https://doi.org/10.1088/1748-3182/6/4/046004, 2011.
Sharifi, R. and Ryu, C. M.: Social networking in crop plants: Wired and wireless cross-plant communications, Plant Cell Environ., 44, 1095–1110, https://doi.org/10.1111/pce.13966, 2021.
Shen, G., Zhang, J., Lei, Y., Xu, Y., and Wu, J.: Between-plant signaling, Annu. Rev. Plant. Biol., 74, 367–386, https://doi.org/10.1146/annurev-arplant-070122-015430, 2023.
Shi, D., Zu, K., Nong, J., Yang, W., Zhang, Y., Liao, S., Zhu, G., and Sun, J.: How new plant species have been discovered in china: Collection gaps and preferences over the past century, Front. Plant Sci., 16, 1605431, https://doi.org/10.3389/fpls.2025.1605431, 2025.
Shin, B., Jung, S., Choi, M., Park, K., and Kim, H.-Y.: Plant-inspired soft actuators powered by water, MRS Bull., 49, 159–172, https://doi.org/10.1557/s43577-024-00663-3, 2024.
Speck, T., Poppinga, S., Speck, O., and Tauber, F.: Bio-inspired life-like motile materials systems: Changing the boundaries between living and technical systems in the anthropocene, Anthropocene Rev., 9, 237–256, https://doi.org/10.1177/20530196211039275, 2022.
Speck, T., Cheng, T., Klimm, F., Menges, A., Poppinga, S., Speck, O., Tahouni, Y., Tauber, F., and Thielen, M.: Plants as inspiration for material-based sensing and actuation in soft robots and machines, MRS Bull., 48, 730–745, https://doi.org/10.1557/s43577-022-00470-8, 2023.
Suda, H., Mano, H., Toyota, M., Fukushima, K., Mimura, T., Tsutsui, I., Hedrich, R., Tamada, Y., and Hasebe, M.: Calcium dynamics during trap closure visualized in transgenic venus flytrap, Nat. Plants, 6, 1219–1224, https://doi.org/10.1038/s41477-020-00773-1, 2020.
Sun, M., Liu, Q., Fan, X., Wang, Y., Chen, W., Tian, C., Sun, L., and Xie, H.: Autonomous biohybrid urchin-like microperforator for intracellular payload delivery, Small, 16, 1906701, https://doi.org/10.1002/smll.201906701, 2020.
Swaine, M. D. and Beer, T.: Explosive seed dispersal in Hura crepitans L. (Euphorbiaceae), New Phytol., 78, 695–708, https://doi.org/10.1111/j.1469-8137.1977.tb02174.x, 1977.
Tauber, F. J., Auth, P., Teichmann, J., Scherag, F. D., and Speck, T.: Novel motion sequences in plant-inspired robotics: Combining inspirations from snap-trapping in two plant species into an artificial venus flytrap demonstrator, Biomimetics, 7, 99, https://doi.org/10.3390/biomimetics7030099, 2022.
Vander Wall, S. B., Kuhn, K. M., and Beck, M. J.: Seed removal, seed predation, and secondary dispersal, Ecology, 86, 801–806, https://doi.org/10.1890/04-0847, 2005.
Vanneste, S., Pei, Y., and Friml, J.: Mechanisms of auxin action in plant growth and development, Nat. Rev. Mol. Cell Biol., 26, 648–666, https://doi.org/10.1038/s41580-025-00851-2, 2025.
Viola, I. M. and Nakayama, N.: Flying seeds, Curr. Biol., 32, R204–R205, https://doi.org/10.1016/j.cub.2022.02.029, 2022.
Vittoz, P. and Engler, R.: Seed dispersal distances: A typology based on dispersal modes and plant traits, Bot. Helv., 117, 109–124, https://doi.org/10.1007/s00035-007-0797-8, 2007.
Volkov, A. G., Foster, J. C., Ashby, T. A., Walker, R. K., Johnson, J. A., and Markin, V. S.: Mimosa pudica: Electrical and mechanical stimulation of plant movements, Plant Cell Environ., 33, 163–173, https://doi.org/10.1111/j.1365-3040.2009.02066.x, 2010.
Walbot, V. and Evans, M. M.: Unique features of the plant life cycle and their consequences, Nat. Rev. Genet., 4, 369–379, https://doi.org/10.1038/nrg1064, 2003.
Wang, B., Hou, Y., Zhong, S., Zhu, J., and Guan, C.: Biomimetic venus flytrap structures using smart composites: A review, Materials, 16, 6702, https://doi.org/10.3390/ma16206702, 2023.
Wang, J., Hu, W., Tian, Y., Caro, S., and Zhao, Y.: Design and analysis of an origami-inspired gripper with passive bistable grasping capability, in: International Conference on Intelligent Robotics and Applications, Xi'an, China, 31 July–2 August 2024, 266–277, https://doi.org/10.1007/978-981-96-0771-6_20, 2024a.
Wang, M., Lin, B.-P., and Yang, H.: A plant tendril mimic soft actuator with phototunable bending and chiral twisting motion modes, Nat. Commun., 7, 13981, https://doi.org/10.1038/ncomms13981, 2016.
Wang, X., Khara, A., and Chen, C.: A soft pneumatic bistable reinforced actuator bioinspired by venus flytrap with enhanced grasping capability, Bioinspir. Biomim., 15, 056017, https://doi.org/10.1088/1748-3190/aba091, 2020.
Wang, X., Pan, C., Xia, N., Zhang, C., Hao, B., Jin, D., Su, L., Zhao, J., Majidi, C., and Zhang, L.: Fracture-driven power amplification in a hydrogel launcher, Nat. Mater., 23, 1428–1435, https://doi.org/10.1038/s41563-024-01955-4, 2024b.
Wani, O. M., Zeng, H., and Priimagi, A.: A light-driven artificial flytrap, Nat. Commun., 8, 15546, https://doi.org/10.1038/ncomms15546, 2017.
Wei, J., Li, R., Li, L., Wang, W., and Chen, T.: Touch-responsive hydrogel for biomimetic flytrap-like soft actuator, Nano-Micro Lett., 14, 182, https://doi.org/10.1007/s40820-022-00931-4, 2022.
Wen, L., Tian, Y., and Jiang, L.: Bioinspired super-wettability from fundamental research to practical applications, Angew. Chem. Int. Ed., 54, 3387–3399, https://doi.org/10.1002/anie.201409911, 2015.
White, B. R.: Soil transport by winds on mars, J. Geophys. Res.-Solid Earth, 84, 4643–4651, https://doi.org/10.1029/JB084iB09p04643, 1979.
Wijerathne, B., Liao, T., Jiang, X., Zhou, J., and Sun, Z.: Plant-inspired surfaces and interfaces for sustainable technologies, Mater. Futures, 4, 012301, https://doi.org/10.1088/2752-5724/ad93ea, 2025.
Wooten, M. B. and Walker, I. D.: Vine-inspired continuum tendril robots and circumnutations, Robotics, 7, 58, https://doi.org/10.3390/robotics7030058, 2018.
Wu, C., Zhao, P., Chang, Z., Li, L., and Zhang, D.: An experimental and numerical investigation of ballistic penetration behaviors of deployable composite shells, Acta Astronaut., 224, 533–545, https://doi.org/10.1016/j.actaastro.2024.08.043, 2024.
Xu, J., Hofhuis, H., Heidstra, R., Sauer, M., Friml, J. i., and Scheres, B.: A molecular framework for plant regeneration, Science, 311, 385–388, https://doi.org/10.1126/science.1121790, 2006.
Xu, Z., Zhou, Y., Zhang, B., Zhang, C., Wang, J., and Wang, Z.: Recent progress on plant-inspired soft robotics with hydrogel building blocks: Fabrication, actuation and application, Micromachines, 12, 608, https://doi.org/10.3390/mi12060608, 2021.
Yan, H., Liu, Z., and Qi, R.: A review of humidity gradient-based power generator: Devices, materials and mechanisms, Nano Energy, 101, 107591, https://doi.org/10.1016/j.nanoen.2022.107591, 2022.
Yan, T., Teshigawara, S., and Asada, H. H.: Design of a growing robot inspired by plant growth, in: 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019, https://doi.org/10.1109/IROS40897.2019.8968200, 8006–8011, 2019.
Yang, J., Zhang, H., Berdin, A., Hu, W., and Zeng, H.: Dandelion-inspired, wind-dispersed polymer-assembly controlled by light, Adv. Sci., 10, 2206752, https://doi.org/10.1002/advs.202206752, 2023a.
Yang, J., Wang, F., and Lu, Y.: Design of a bistable artificial venus flytrap actuated by low pressure with larger capture range and faster responsiveness, Biomimetics, 8, 181, https://doi.org/10.3390/biomimetics8020181, 2023b.
Yang, J., Shankar, M. R., and Zeng, H.: Photochemically responsive polymer films enable tunable gliding flights, Nat. Commun., 15, 4684, https://doi.org/10.1038/s41467-024-49108-0, 2024.
Yang, M., Cooper, L. P., Liu, N., Wang, X., and Fok, M. P.: Twining plant inspired pneumatic soft robotic spiral gripper with a fiber optic twisting sensor, Opt. Express, 28, 35158–35167, https://doi.org/10.1364/OE.408910, 2020.
Yoo, D., Kim, S. J., Joung, Y., Jang, S., Choi, D., and Kim, D. S.: Lotus leaf-inspired droplet-based electricity generator with low-adhesive superhydrophobicity for a wide operational droplet volume range and boosted electricity output, Nano Energy, 99, 107361, https://doi.org/10.1016/j.nanoen.2022.107361, 2022.
Yoon, H.-J., Lee, G., Kim, J.-T., Yoo, J.-Y., Luan, H., Cheng, S., Kang, S., Huynh, H. L. T., Kim, H., and Park, J.: Biodegradable, three-dimensional colorimetric fliers for environmental monitoring, Sci. Adv., 8, eade3201, https://doi.org/10.1126/sciadv.ade3201, 2022.
Zeng, X., Wang, Y., and Morishima, K.: Asymmetric-bifurcation snapping, all-or-none motion of venus flytrap, Sci. Rep., 15, 4805, https://doi.org/10.1038/s41598-024-82156-6, 2025.
Zhang, J., Yang, H., Zhao, Y., Yang, J., Aydin, Y. O., Li, S., Rajabi, H., Peng, H., and Wu, J.: Adaptive, rapid, and stable trident robotic gripper: A bistable tensegrity structure implementation, IEEE/ASME Trans. Mechatron., 1–11, https://doi.org/10.1109/tmech.2024.3516948, 2024a.
Zhang, J., Yang, H., He, C., Ma, H., Zhao, Y., Zhang, Z., Li, S., Wang, W., Yang, J., Wu, J., and Peng, H.: Instant energy barrier modulation in bistable robotic grippers for compliant triggering and powerful grasping, Research, 8, 0737, https://doi.org/10.34133/research.0737, 2025.
Zhang, M., Wang, B., Wang, S., Xin, T., Ye, K., Huang, S., and Yang, X.: Transcriptomic analysis on cucumber tendril reveals glrs play important roles in thigmotropism and thigmomorphogenesis, Hortic. Plant J., 10, 1177–1186, https://doi.org/10.1016/j.hpj.2022.11.011, 2024b.
Zhang, X., Wang, Y., Tian, Z., Samri, M., Moh, K., McMeeking, R. M., Hensel, R., and Arzt, E.: A bioinspired snap-through metastructure for manipulating micro-objects, Sci. Adv., 8, eadd4768, https://doi.org/10.1126/sciadv.add4768, 2022a.
Zhang, Y., Quan, J., Li, P., Song, W., Zhang, G., Li, L., and Zhou, D.: A flytrap-inspired bistable origami-based gripper for rapid active debris removal, Adv. Intell. Syst., 5, 2200468, https://doi.org/10.1002/aisy.202200468, 2023.
Zhang, Z., Chen, D., Wu, H., Bao, Y., and Chai, G.: Non-contact magnetic driving bioinspired venus flytrap robot based on bistable anti-symmetric cfrp structure, Compos. Struct., 135, 17–22, https://doi.org/10.1016/j.compstruct.2015.09.015, 2016.
Zhang, Z., Ni, X., Gao, W., Shen, H., Sun, M., Guo, G., Wu, H., and Jiang, S.: Pneumatically controlled reconfigurable bistable bionic flower for robotic gripper, Soft Robot., 9, 657–668, https://doi.org/10.1089/soro.2020.0200, 2022b.
Zhang, Z., Ni, X., Wu, H., Sun, M., Bao, G., Wu, H., and Jiang, S.: Pneumatically actuated soft gripper with bistable structures, Soft Robot., 9, 57–71, https://doi.org/10.1089/soro.2019.0195, 2022c.