the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 25 Mar 2026
| 25 Mar 2026
Review article: A review of control technologies for soft robots: from structural design to intelligent control
Huijun Yu
Min Lv
Bin Hu
Yang Zhang
Soft robots, with flexible materials and biomimetic structures, show great potential in medical rehabilitation, the exploration of unstructured environments, and precision operations. However, their highly nonlinear, continuously deforming, and difficult-to-model characteristics pose significant challenges for control. This paper provides a systematic review of research progress in the field of soft robotics control: at the mechanical level, the combination of different biomimetic structures, materials, and actuation methods offers diverse motion patterns; kinematic and dynamic modeling methods encompass both classical physics-based theories and modern techniques; trajectory planning focuses on objectives such as obstacle avoidance and time optimization, as well as visual servoing; and control strategies summarize research progress in model-based control and model-free control. Despite significant achievements, soft robots still face challenges such as low drive efficiency and insufficient real-time performance. Future research should overcome these bottlenecks to advance the practical application of soft robots. This paper aims to provide technical references for researchers and promote further development in the field of soft robot control.
- Article
(6513 KB) - Full-text XML
- BibTeX
- EndNote




Soft robots possess high levels of compliance, adaptability, and human–machine interaction safety, demonstrating significant application potential in fields such as medical rehabilitation, precision manipulation, disaster relief, and wearable devices. Compared to traditional rigid robots, soft robots are composed of flexible materials to adapt to complex environments through continuous deformation and achieve flexible movements similar to those of biological organisms. However, this compliance also poses significant challenges in modeling and control: highly nonlinear material properties, time-varying dynamic behavior, and continuous deformation across multiple degrees of freedom, making traditional robot control methods difficult to apply directly.
With the rapid development of new materials, novel actuation methods, and intelligent control technologies, soft robots have transitioned from the laboratory to engineering applications, demonstrating unique value in fields such as healthcare, the exploration of unstructured environments, and industrial automation. Intuitive Surgical's Ion™ Robotic Endoluminal System received FDA approval in 2019. Its soft robotics catheter has an outer diameter of just 3.5 mm and is equipped with an imaging probe with an outer diameter of 1.7 mm for direct visualization (Fernandez-Bussy et al., 2024). The Marine Biological Laboratory in Woods Hole, USA, deployed a biomimetic jellyfish robot in the coastal waters off Massachusetts to monitor marine ecosystems (Xu et al., 2020). During the COVID-19 pandemic, a team from Beihang University utilized a bare-hand, non-contact, interactive soft robotic arm for collecting throat swabs (Liu et al., 2022).
At the same time, the application of soft robots is also driving scientific and technological progress. Researchers at Harvard University proposed an inverse design framework to discover flexible mechanical metamaterials with target nonlinear dynamic responses (Bordiga et al., 2024). Collaborating with the Max Planck Institute, Tongji University developed a pangolin-inspired robot featuring soft skin and hard scales, which can deform, roll, and deliver targeted heat inside the human body under magnetic actuation (Soon et al., 2023). Researchers at the University of California, San Diego, created a lightweight quadruped soft robot that maintains system control and movement through pneumatic circuits and does not require any electronic devices for propulsion, marking an important step toward fully autonomous robots (Drotman et al., 2021).
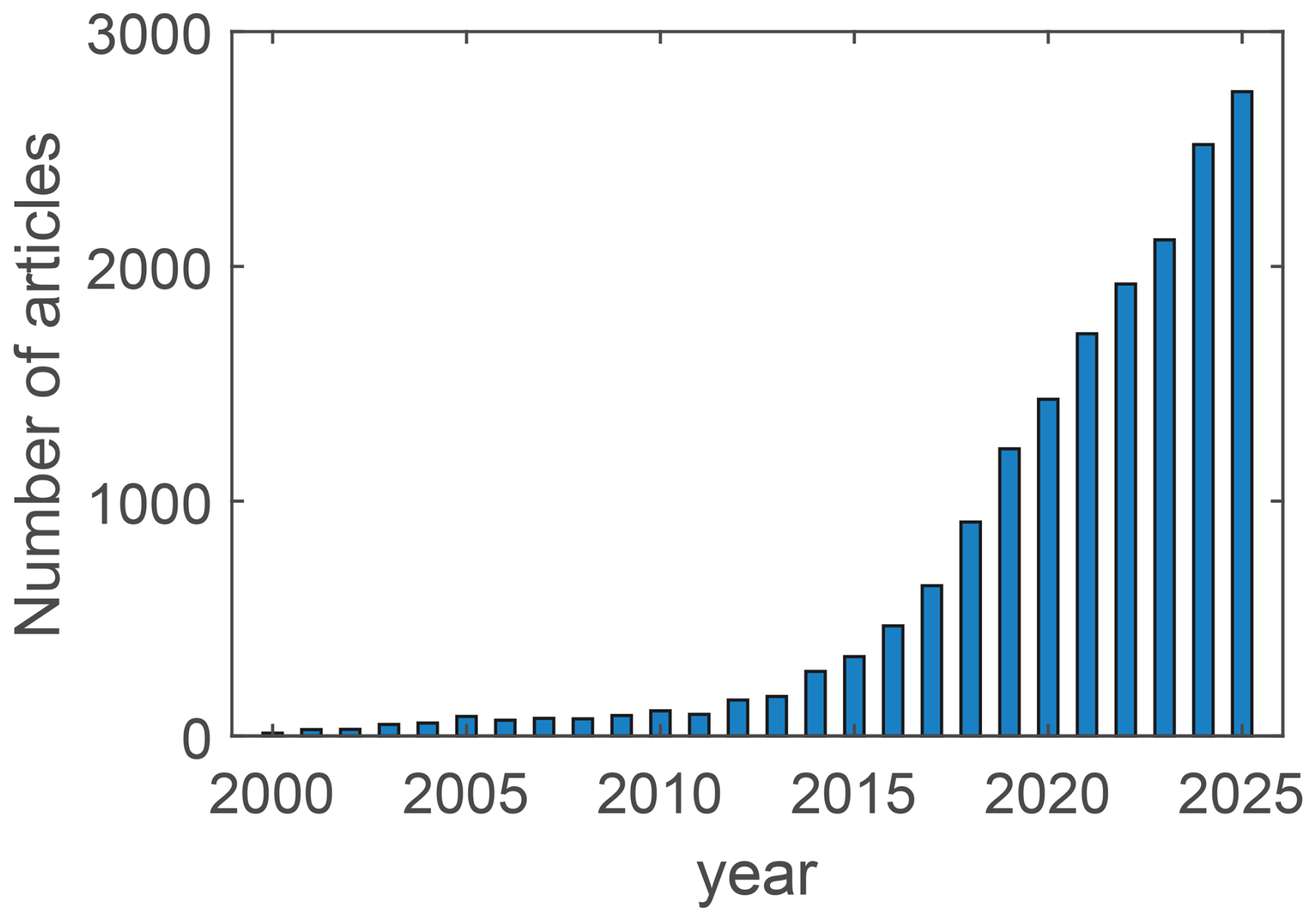
In recent years, soft robotics technology has gradually become a research hotspot, as evidenced by the number of published papers. Using the keyword “soft robotics”, a search in the Web of Science Core Collection yielded the number of papers related to soft robotics from 2000 to 2025, as shown in Fig. 1. It can be seen that soft robotics began to enter the public eye only after 2013; since 2016, the number of related papers has increased approximately linearly with each passing year and has yet to reach its peak, demonstrating the vigorous development trend in the field of soft robotics.
A network analysis of 1237 papers was conducted using CiteSpace software, with the results shown in Fig. 2. Based on the analysis of countries and institutions, the USA and China have the most extensive research content, followed by Japan, Switzerland, Italy, and England. Institutions such as the University of California System, the Chinese Academy of Sciences, ETH Domain, and Shanghai Jiao Tong University have made significant contributions to the field of soft robotics. Cluster analysis of keywords reflects the mainstream research directions in soft robotics: the design and manufacture of mechanisms and the selection of actuation methods, kinematic and dynamic modeling, control, and the application of data-driven methods in soft robotics.
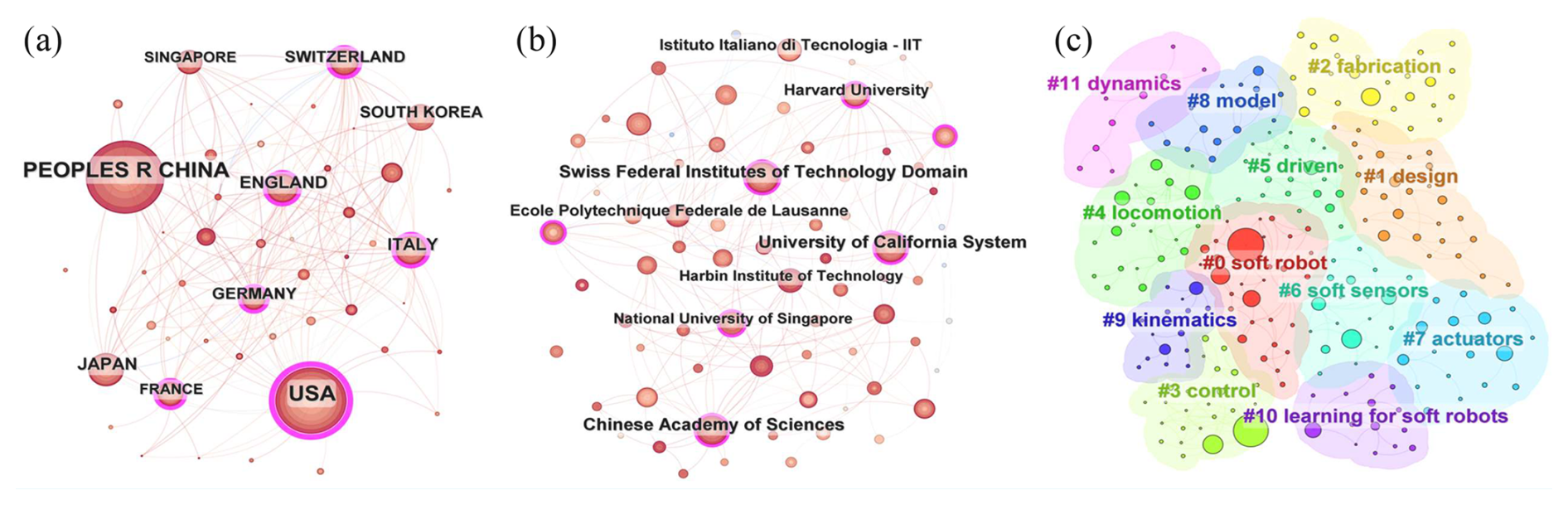
Figure 2Network analysis of soft robotics: (a) country analysis, (b) institution analysis, (c) keyword clustering analysis.
This paper systematically reviews the research progress from mechanism design to advanced control methods around the core issues of soft robotics control. Section 2 reviews the structural design, materials, and actuators of robotic systems; Sect. 3 introduces kinematic and dynamic modeling techniques; Sect. 4 analyzes motion planning for soft robots; Sect. 5 compares the advantages and disadvantages of model-based and model-free control strategies; and Sect. 6 summarizes current challenges and outlines future development directions, aiming to provide guidance for further research in the field of soft robot control.
The mechanism of soft robots includes structural design, materials, and actuators, which together determine the motion capability, environmental adaptability, and control strategies of robots. Typical mechanism cases are shown in Fig. 3. The mechanism is not only the basis for modeling, planning, and control but also determines the upper limit of the robot's dynamic performance.
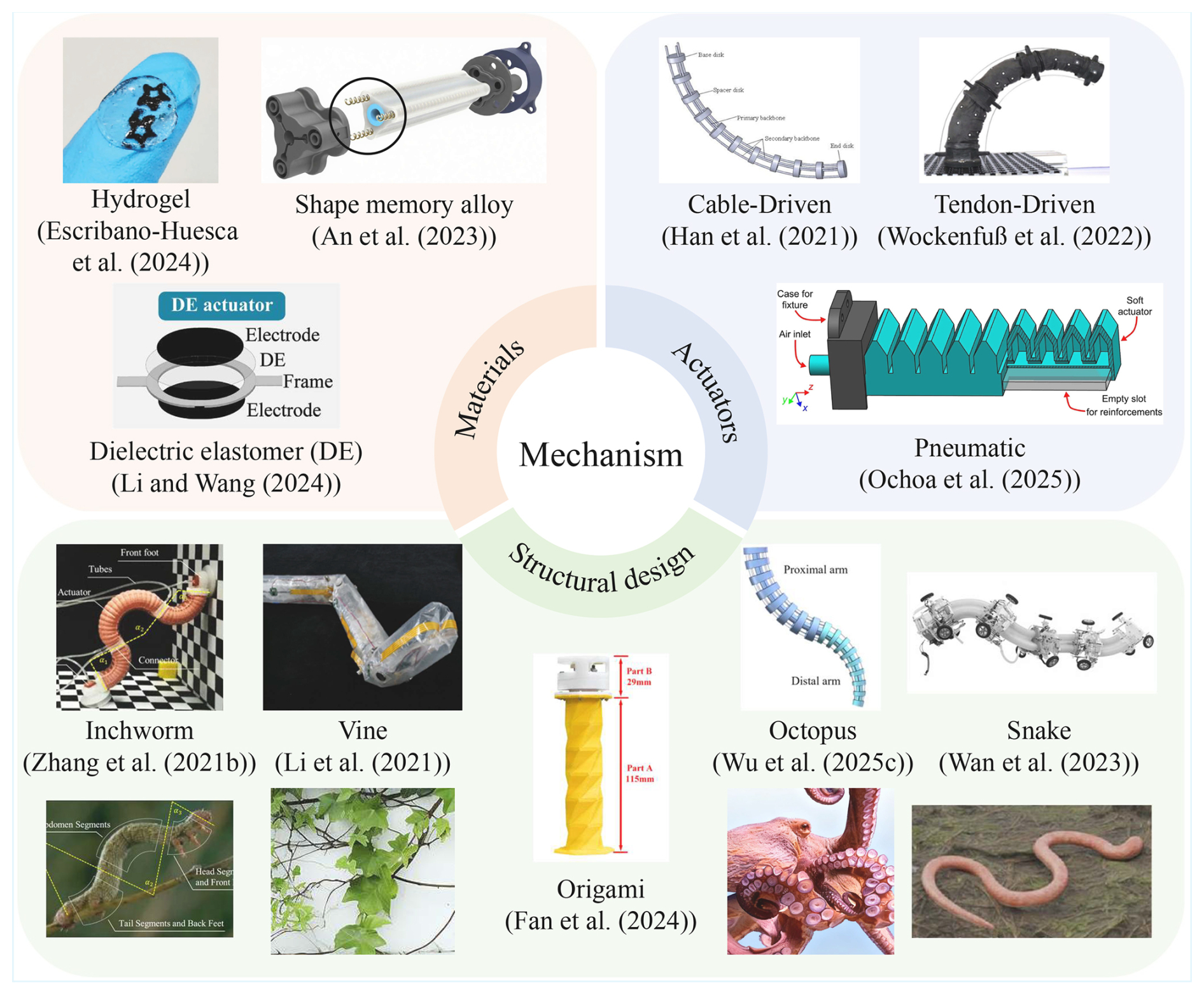
Figure 3Typical mechanism cases.
2.1 Structural design
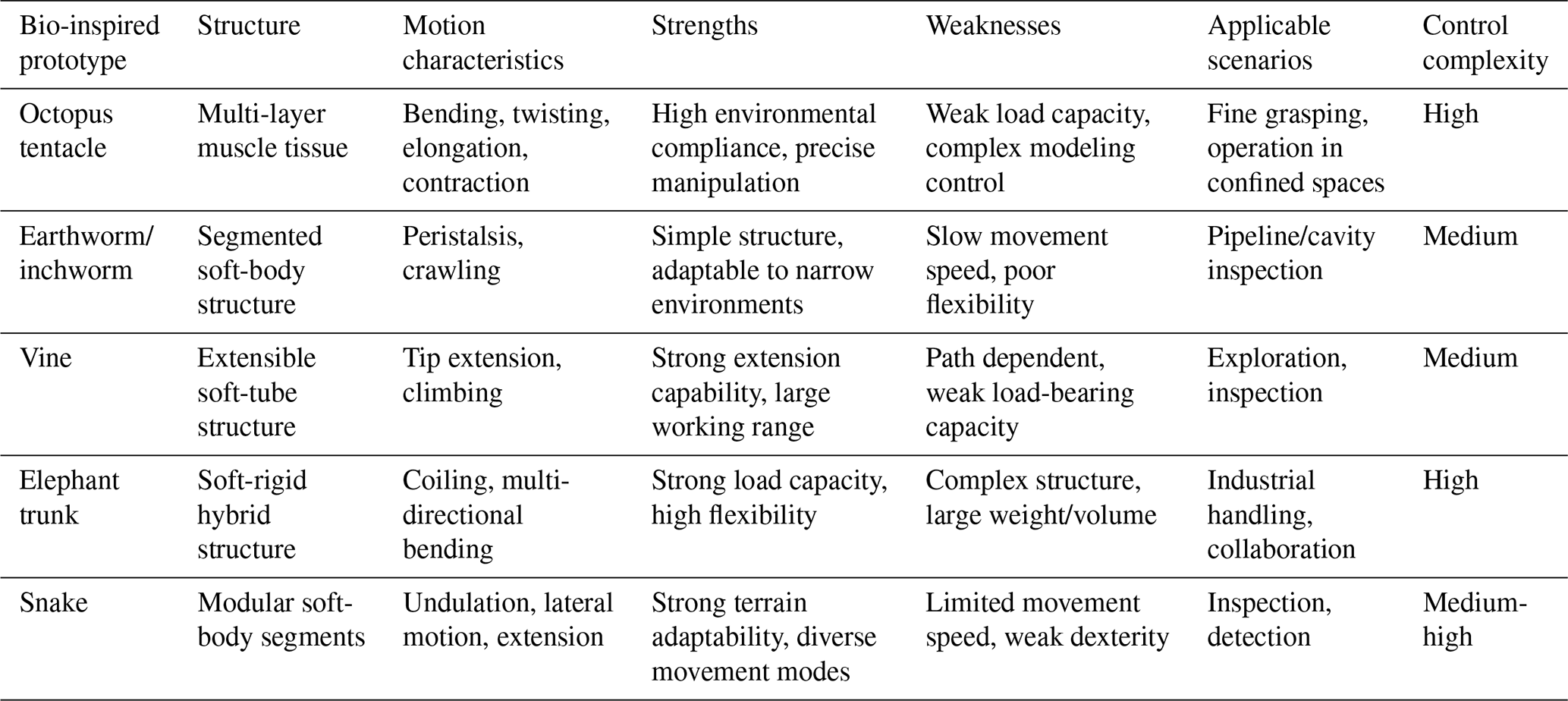
The structural design of soft robots draws heavily on the morphology and movement mechanisms of biological organisms to achieve efficient, flexible, and environmentally adaptive movement. Typical biomimetic-inspired structures include octopus tentacles, earthworms/inchworms, vines, elephant trunks, and snakes. Table 1 provides a comparative analysis of the motion characteristics, strengths, weaknesses, applicable scenarios, and control complexity of various soft robots with bio-inspired structures. Additionally, there are soft robots inspired by origami.
Table 1Comparison of soft robots with different bio-inspired structures.
Octopus tentacles possess a unique muscle-connective tissue composite structure composed of longitudinal muscle, transverse muscle, and oblique connective tissue, enabling multi-degree-of-freedom motion without skeletal support, including bending, twisting, elongation, and contraction. Based on this principle, Han et al. (2021) constructed a conical silicone continuum soft robot. Papadakis et al. (2024) achieved high-compliant multi-degree-of-freedom movement by simulating longitudinal muscles with linear chambers for bending and extension, spiral chambers for bidirectional twisting, and rigid rings to constrain radial deformation.
Earthworms/inchworms achieve peristaltic movement through the periodic contraction and expansion of their segments. Their locomotion mechanism relies on the antagonistic action of circular muscles and longitudinal muscles, as well as friction regulation by body surface bristles. Shi et al. (2025) designed an earthworm-like peristaltic structure composed of continuous silicone gel columns, with a uniform cylindrical cross-section that can undergo nonlinear axial stretching deformation, driven by segmented or continuous strain waves to achieve retrograde peristaltic propulsion. Zhang et al. (2021b) designed an inchworm-like soft structure composed of three segments of fiber-reinforced pneumatic muscles connected in series, with negative pressure suction cups integrated at both ends. Controlled bending and adhesion enable crawling, climbing, and transitional movements.
Vine plants achieve climbing through apical growth and the spiral contraction of tendrils. Their movement relies on the synergistic regulation of tropism and phototropism. Li et al. (2021) and Kalibala et al. (2024) both used thin-walled polyethylene tubes to construct vine-like soft robots, achieving tip extension and turning by releasing pre-stored segments via four sets of electromagnetic steering units.
An elephant's trunk consists of approximately 150 000 muscle bundles, combining flexibility with load-bearing capacity. Its movement relies on hierarchical coordinated muscle contraction and the extensibility of skin folds. Morasso (2025) designed an elephant-trunk-like hybrid robot comprising a 6-degrees-of-freedom rigid skeleton and a 48-degrees-of-freedom soft hydrostatic segment in series, driven by an adjustable compliance matrix to achieve redundant degree-of-freedom coordination and end-effector interaction adjustment.
Snakes leverage body bending and coordinated muscle contractions to demonstrate powerful locomotion capabilities, including serpentine, sidewinding, and concertina movements. Wan et al. (2023) proposed a modular 3D soft robotic snake, whose structure consists of three-segment, actively deformable pneumatic silicone modules connected in series. Mendoza and Haghshenas-Jaryani (2024) developed a modular soft robot that achieves a bidirectional crawling motion along the exterior of tubular structures through alternating grip and extension movements.
Origami structures achieve programmable deformation through folding–unfolding mechanisms, with crease designs enabling various deformation modes, including unfolding, bending, and twisting. Cai et al. (2020) proposed a cable-free caterpillar-inspired biomimetic robot based on a triangular origami spring skeleton and coupled drive, with internal and external magnets, achieving adjustable structural stiffness and multi-modal motion through programmable crease patterns. Liu et al. (2025b) were inspired by the Kresling origami structure and proposed an untethered soft robot capable of crawling in pipelines, with a high contraction ratio. Fan et al. (2024) proposed a vacuum-driven parallel continuum robot, utilizing soft–hard hybrid 3D-printed self-sensing origami linkages to achieve high load capacity, multi-modal motion, and precise closed-loop control.
These structural designs fully leverage the flexible multi-joint characteristics of the biological world. Compared to rigid robotic arms, soft robots significantly increase degrees of freedom and flexibility in their structure. However, at the same time, this multi-joint design also introduces considerable challenges and uncertainties in motion and mechanical control.
2.2 Materials
Soft robots primarily utilize elastic materials such as hydrogels, and dielectric elastomers or composite materials (Wang et al., 2025a), which exhibit high extensibility, low Young's modulus, and excellent energy absorption properties, making them well suited to soft robotics. Additionally, common materials include shape memory materials and magnetoresponsive materials.
Hydrogels are soft hydrophilic materials composed of a network of hydrophilic polymers and a large amount of water. Their unique properties stem from the interactions between polymer chains and water molecules. Based on their stimulus response characteristics, hydrogels can be classified into various types, including temperature responsive (Escribano-Huesca et al., 2024), light responsive (Guo et al., 2025a), and magnetically responsive (Shen and Zou, 2024; Wang et al., 2025b). Hydrogels exhibit excellent biocompatibility and mechanical properties similar to those of the environment, but they have low mechanical strength and slow response speeds.
Dielectric elastomers are a class of polymer materials with high dielectric constants and excellent elastic deformation capabilities, whose operational mechanism is based on the Maxwell stress effect. When an external electric field is applied to both sides of an electrically polarized dielectric elastomer film, the material compresses in the thickness direction and expands in the planar direction, resulting in significant electromechanical deformation. Dielectric elastomers have fast response speeds and high energy density, and can directly convert electrical energy into mechanical energy, making them widely used in soft robots (Li et al., 2023a; Huang et al., 2025; Li and Wang, 2024). However, they also face challenges such as high driving voltages and insufficient long-term cycling stability.
Shape memory alloys are a class of metallic materials with unique shape memory effects and superelasticity, capable of restoring their preset shapes under external stimuli. The most commonly used shape memory alloy is nickel-titanium-based alloy, which exhibits excellent shape recovery rates, biocompatibility, and long cycle lifetimes. However, it suffers from slow response speeds and low driving efficiency (An et al., 2023; Patterson et al., 2025).
Magnetoresponsive materials are a class of functional materials that generate controllable mechanical responses under external magnetic fields. Common types include magnetorheological materials (including magnetorheological fluids and magnetorheological elastomers), magnetic composite materials (where magnetic particles are dispersed in polymers/hydrogels; Xing and Yong, 2021; Davy et al., 2023; Shen and Zou, 2024; Guo et al., 2025b), and liquid magnetic materials (such as ferromagnetic fluids; Kong et al., 2020). Magnetoresponsive materials possess wireless remote control and precise positioning control capabilities, demonstrating significant application potential in fields such as micro-robots and medical robots.
2.3 Actuators
The actuators of soft robots are closely related to their motion performance and modeling control. Common actuators include pneumatic drive, cable drive, and tendon drive.
Pneumatic drive induces deformation of the elastomer by regulating the air pressure within a sealed cavity. When the internal air pressure increases, the elastic cavity expands and deforms; when the air pressure decreases, the material's elastic recovery force causes it to contract (Roshanfar et al., 2023; Asawalertsak et al., 2023). Typical pneumatic actuators employ a multi-layer elastic material structure with a complex network of air channels embedded internally (Ochoa et al., 2025; Lu et al., 2023). Enhanced designs incorporate fiber reinforcement layers within the elastic matrix to control deformation direction and improve mechanical performance (Wang et al., 2024c; Cheng et al., 2021). Recent research has also developed vacuum-driven variants, which offer advantages such as energy efficiency, safety, and rapid response (Long et al., 2023; Fan et al., 2024; Taguchi and Sawada, 2025).
The cable drive system consists of a high-strength fiber cable core and a low-friction outer sheath. A servo motor winds the flexible cable, converting rotational motion into axial tensile force on the flexible skeleton, thereby generating bending/contraction (Lai et al., 2022). Multiple cables working together can achieve complex movements (Morales-Enríquez et al., 2025; Wei et al., 2024). It features high force transmission efficiency and precise motion control (Han et al., 2021) but can only transmit tensile force, not compressive force, and suffers from friction losses and hysteresis effects (Zhou et al., 2024).
Tendon-driven systems are based on biomimetic design, mimicking biological muscle-tendon systems. They achieve bidirectional motion through the synergistic action of opposing tendon pairs, with changes in tendon tension regulating joint stiffness (Roshanfar et al., 2023). Common tendon materials include high-strength fibers, steel wires (Feliu-Talegon et al., 2024), and nylon threads (Xiao et al., 2023). By controlling the contraction length or tension of single or multiple tendons, the structure generates motions such as bending and deformation (Rao et al., 2022, 2023). While tendon-driven systems exhibit highly biomimetic motion patterns and enable variable stiffness adjustment (Wockenfuß et al., 2022), they suffer from slow dynamic response and complex control requirements.
Soft robots are constructed from flexible materials, with mechanical designs enabling complex and supple movements. However, their ability to undergo continuous deformation and possess infinite degrees of freedom poses significant challenges for describing and predicting robotic behavior. Conventional modeling approaches for rigid robots cannot be directly applied. However, researchers have achieved the transition from discrete joints to continuum modeling by geometric mapping. This transforms rigid joints into deformable links, increasing the dimensionality to extend the limited joint degrees of freedom to the multiple degrees of freedom of a soft robot, along with other techniques. Soft robot modeling includes kinematic modeling and dynamic modeling. By establishing mathematical models to describe the motion characteristics and mechanical properties of soft robots, a foundation is provided for the design of robot planning and control strategies.
3.1 Kinematic modeling
Kinematic models are used to describe geometric relationships and the motion characteristics of robots, serving as the foundation for trajectory planning and position control. The continuous deformation characteristics of soft robots render traditional Denavit–Hartenberg (DH) parameter methods inapplicable, necessitating alternative methods such as the segment curvature assumption or Cosserat rod theory.
3.1.1 Segment curvature assumption
The piecewise constant curvature (PCC) model divides the soft robot into multiple circular segments with constant curvature, to describe its configuration using curvature, arc length, and twist angle. Kinematic modeling divides the robot space into the actuator space, configuration space, and task space, establishing mappings between these spaces through the functions g(⋅) and m(⋅), as shown in Fig. 4. The PCC method is highly efficient in computation, physically interpretable, and adaptable to multi-segment structures, making it widely adopted. For example, Wei et al. (2024) used the PCC method to solve the kinematic mapping relationship. Xu et al. (2023) used this method to establish forward and inverse kinematic models for particle-interference soft robots. He et al. (2023) further introduced Lagrange equations to model soft components, while also considering elastic deformation caused by gravitational loads. Emet et al. (2024) proposed a new procedure that relies on the PCC method to simplify highly complex hyper-redundant soft robotic arm models.

Figure 4Kinematic mapping relationship (Wei et al., 2024).
The PCC model can only provide limited deformation modes because it simply divides the entire soft robotic arm into several segments, with the curvature of each segment treated as a constant. To address this issue, Ochoa et al. (2025) proposed a kinematic model based on the multi-curvature method; Chen et al. (2022b) studied a new method for modeling the kinematics of variable-curvature soft robots based on the minimum energy method. They broke through the geometric limitations of PCC, significantly improving the accuracy and adaptability of soft robot motion description. Models established based on the segmented curvature assumption are intuitive, highly generalizable, and computationally efficient, making them suitable for scenarios requiring high real-time performance and where the robot's bending deformation is relatively smooth. However, their ability to describe complex deformations is limited, and the idealized assumptions inherently introduce model errors, resulting in finite precision.
3.1.2 Cosserat rod theory
Cosserat rod theory provides a rigorous mechanical framework for the continuous deformation of soft robots. Its core idea is to treat soft structures as elastic rods capable of withstanding stretching, shearing, bending, and torsion, describing their kinematic and dynamic behavior using continuum mechanics methods. The Cosserat rod theory assumes that the length of the linear model is much greater than the cross-sectional radius, meaning that the soft robotic arm is treated as a spatial curve. As shown in Fig. 5a, there are two coordinate systems: the global coordinate system and the local coordinate system , where s represents the position of a point on the curve. Among them, {d1(s),d2(s)} constitutes the cross-section at that point, and d3(s) is the normal vector of that cross-section. It is important to note that d3(s) is not necessarily in the same direction as the tangent to the curve; when they are different, it indicates that there is shear at s.
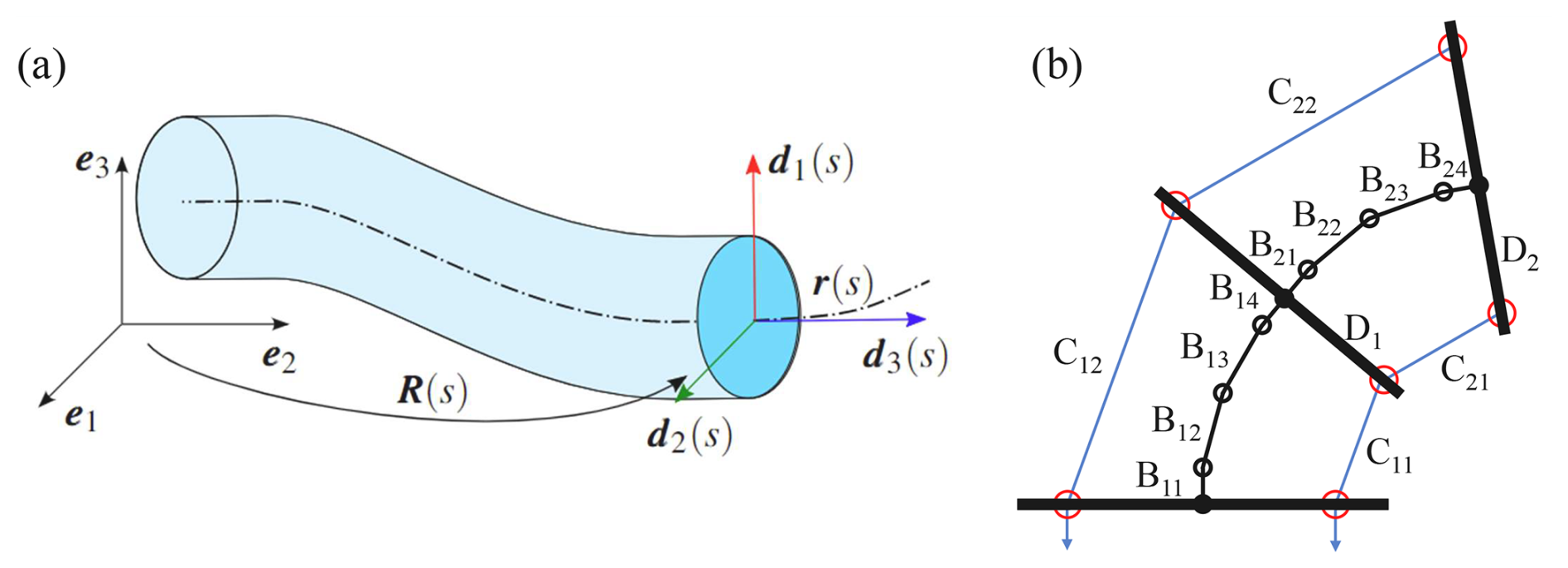
Figure 5Geometric descriptions of the Cosserat rod theory and the pseudo-rigid body model: (a) Cosserat rod theory (Kugelstadt and Schömer, 2016), (b) pseudo-rigid body model (Troeung et al., 2023).
The configuration of a Cosserat rod is described by the position vector p(s) and the rotation matrix R(s), while deformation is described by the strain vector , where v is the linear strain and u is the angular strain:
Based on Cosserat theory, Feliu-Talegon et al. (2024) described the kinematics of soft robotic hands, and Xiao et al. (2023) developed a model to estimate the shape of soft robots, with accurate prediction results and support for 6 degrees of freedom strain and large deformations. However, the computational complexity is high, making it unsuitable for real-time control and difficult to widely adopt. Based on the Cosserat rod theory, the kinematic model for soft robots offers high accuracy, supports complex deformation modes, and features clear physical meaning of parameters along with strong generalizability. It is well suited to high-precision control and shape prediction under complex constraints. However, the equations are complex, resulting in high computational cost for numerical solutions, making it difficult to achieve real-time control.
3.1.3 Pseudo-rigid body model
The pseudo-rigid body model is a method of simplifying a flexible continuum into an equivalent mechanism consisting of rigid links and flexible joints, widely applied in the kinematic modeling of soft robots. Its core idea is to approximate continuous deformation using discrete rigid elements and virtual springs, balancing computational efficiency and accuracy. Figure 5b illustrates a single-segment continuum robot with two sub-segments. The flexible main body of each sub-segment is decomposed into a series of pseudo-rigid links (B), connected via torsion springs (black circles), with flexible deformation simulated by virtual springs. The driving tendons are equivalent to a series of pseudo-rigid prismatic joints (C). Tendons are connected to disks (D) via passive rotational joints (red circles), and disks are connected to pseudo-rigid links via fixed joints (black dots).
Based on the above principles, Zhang et al. (2025) proposed a parameter estimation paradigm coupling an analytical modeling method based on pseudo-rigid body modeling with the logarithmic decay method. Troeung et al. (2023) introduced a new modeling method based on pseudo-rigid body modeling, constraint analysis of multi-body systems, and Lagrange multipliers. Similarly, Zhang et al. (2024a) proposed a method based on a unified rigid-flexible model, modeling kinematics, and dynamics by treating soft joints as flexible universal joints. The pseudo-rigid body model is computationally efficient, has simple parameter identification, and is highly compatible with traditional robot control algorithms, making it suitable for embedded control and the rapid development of soft robots. However, it has significant prediction errors in dynamic responses, difficulties in modeling environmental interactions, and insufficient accuracy for large deformations, making it unsuitable for high-precision control scenarios.
3.1.4 Others
Neural networks represent a data-driven approach that bypasses complex physical modeling processes by establishing direct mapping from driving inputs to motion outputs. They are inherently suited to approximating high-dimensional nonlinear mappings and do not require the explicit formulation of geometric or mechanical equations, significantly lowering the barrier to modeling. This makes them well suited to soft robots, which exhibit large deformations, hysteresis, and nonlinearities. Using neural networks, Morales-Enríquez et al. (2025) derived an artificial learning rule to approximate the kinematic model of a soft robot. Chen et al. (2022a) constructed a motion model for a soft robotic fish by training a neural network on data collected from visual sensors. Based on a multi-layer perceptron neural network, Tao et al. (2024) proposed a method for learning the inverse kinematics of a soft origami continuum robot. Huang et al. (2024a) introduced an iterative self-improving learning strategy based on long short-term memory networks for end-to-end inverse kinematics modeling. However, neural networks are highly data dependent and incur high data acquisition costs. They also suffer from poor interpretability and reliability, and their generalizability is limited by the scope of the training data.
In addition, researchers have also developed kinematic models for soft robots based on various theoretical frameworks, including free Euler–Bernoulli beam theory (Barbosa et al., 2023), discretized elastic beam theory (Liu et al., 2025c), continuum mechanics (Lu et al., 2023), and Jacobian matrix theory (Huang et al., 2023), and by employing methods such as the force density method (Liu et al., 2025c), Euler arc spline approximation (Rao et al., 2022), transformation matrix method (Yang et al., 2023a; Sayahkarajy et al., 2024), absolute nodal coordinate formulation (Huang et al., 2022), finite element analysis (Ambaye et al., 2025; Zhao et al., 2024; Ma et al., 2025; Li et al., 2025), and spatial curve integration (Chen et al., 2021).
3.2 Dynamic modeling
Dynamic models study the relationship between force and motion, i.e., what kind of force needs to be applied to a physical object to achieve a certain motion. They reveal the dynamic relationship between driving inputs and motion responses, providing a theoretical framework for force/position hybrid control, impedance control, and other control methods.
3.2.1 Cosserat rod theory
In addition to kinematic models, Cosserat rods are widely used in the dynamic modeling of soft robots. For example, Alessi et al. (2024) developed a dynamic Cosserat rod model for soft robots; Roshanfar et al. (2023) used dynamic Cosserat rod theory to comprehensively address various aspects of deformation, including bending, torsion, shear, and stretching; and Li and Xu (2024) employed an optimized Cosserat rod model for the kinematic and dynamic analysis of multi-section magnetic soft robots. Furthermore, Yang et al. (2023b) combined screw theory with Cosserat theory to establish a dynamic model for soft robotic arms; Matia et al. (2023) employed an accurate predictive model coupled with a large-deformation Cosserat rod model and low Reynolds number flow; and Wiese et al. (2023) proposed and analyzed a method to incorporate contact modeling into the widely used shooting-based Cosserat rod implementation. Cosserat rod-based dynamic modeling provides a physically consistent and high-precision simulation and control foundation for soft robots, but it also faces challenges such as complex contact modeling and difficulties in real-time control.
3.2.2 Finite element method
The basic idea of the finite element method (FEM) is to discretize a continuum into a finite number of elements connected by nodes, approximate continuous field variables (including displacement, strain, and stress) using piecewise interpolation functions, and ultimately solve a system of algebraic equations to achieve high-precision simulation of soft robotics' nonlinear large deformations and dynamic behavior. The mapping from coordinate space to finite element space is shown in Fig. 6. Here, qr is the simplified coordinate of the rigid robot, qm is the maximum coordinate of the rigid probe, qn is the node coordinate of the non-rigid body, and M is the mapping function.
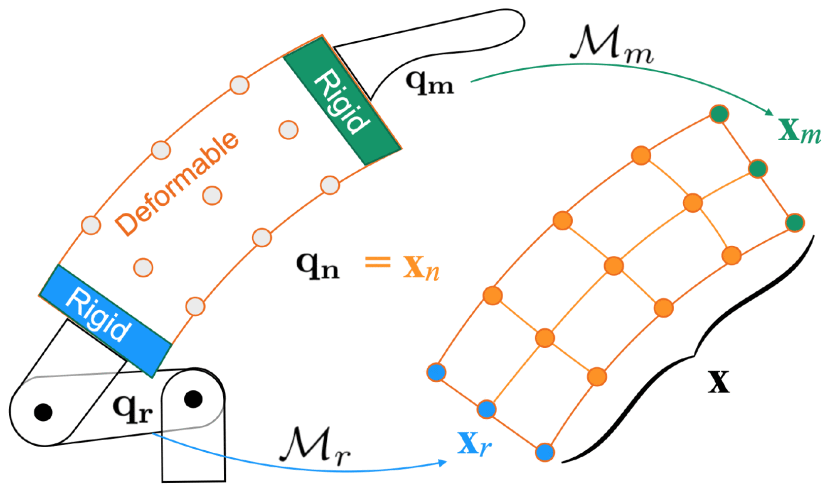
Figure 6From coordinate space (left) to FEM space (right) (Coevoet et al., 2022).
Based on the FEM for modeling soft components, Coevoet et al. (2022) achieved the propagation of forces and displacements between soft and rigid models through a mapping mechanism. Li et al. (2022) introduced an orthogonal decomposition algorithm to significantly reduce the size of large robot models obtained from the FEM, while preserving their structural and stability characteristics. Subsequently, they (Li et al., 2023b) used the proper orthogonal decomposition algorithm to reduce the order of the model and proposed an iterative training method using radial basis function networks to construct the robot model. Sun et al. (2023) controlled the dynamic changes in vacuum pressure in each segment based on numerical simulations from the FEM. Similarly, Davy et al. (2023) proposed a magnetic soft robot simulation framework using the material point method, which inherently simulates self-collisions between model regions and can capture the effects of forces in non-uniform magnetic fields. The FEM possesses high-precision modeling capabilities and can accurately fit the nonlinear characteristics of materials (Zhao et al., 2025), but it is computationally expensive, lacks real-time performance, and faces inherent challenges such as mesh distortion under large deformations.
3.2.3 Lagrange method
As an important tool in analytical mechanics, the Lagrange method establishes the system's dynamical equations from an energy perspective, making it suitable for addressing dynamical problems in multi-degree-of-freedom, nonlinear systems such as soft robots. The Lagrange equations are:
where L is the Lagrange function given by , T is kinetic energy, V is potential energy, q is the generalized coordinate, and Qext is the non-conservative force.
Using the Lagrange method, Xing and Yong (2021) derived the dynamic motion equations for soft robots; and Kalibala et al. (2024) developed a dynamic model for plant-inspired growing robots and employed model predictive control to regulate task space position, orientation, and interaction forces. Building on this, Xie et al. (2022) introduced a PCC assumption to propose a simplified dynamic model for an underwater soft robotic arm, while accounting for the nonlinear viscoelasticity of soft materials; Liu et al. (2025a) combined the Lagrangian equations, PCC method, and generalized coordinates to establish a nonlinear dynamic model for soft robots; and Seleem et al. (2023) derived a singularity-free dynamic model based on the Lagrangian formula and the Taylor series expansion of a two-segment continuum robot. The Lagrangian method is widely used in the dynamic modeling of soft robots due to its energy consistency and nonlinear adaptability, but it also faces challenges such as high computational complexity and difficulties in online control and modeling non-conservative forces.
3.2.4 Koopman operator theory
Koopman operator theory (Koopman, 1931) provides a data-driven global linearization method for nonlinear soft robot systems, achieving the high-precision prediction of linear models by mapping nonlinear dynamics to an infinite-dimensional function space. Consider the following discrete nonlinear dynamic system with control inputs:
where x and u represent the state and input of the system, respectively. The Koopman operator advances the evolution of observables through dynamic flows:
where Kd denotes the discrete-time Koopman operator and ∘ denotes the composite operation of ψ and f. ψ is referred to as an observable function in the elevated space. This equation can be further expressed as
The above equation indicates that the application of the infinite-dimensional Koopman operator transforms the system from a finite-dimensional nonlinear state space to an infinite-dimensional linear function space.
Based on the Koopman operator, Wang et al. (2023) proposed a modeling and control scheme for soft robots. Haggerty et al. (2023) utilized a data-driven learning method based on Koopman operator theory for modeling and introduced the concept of the static Koopman operator as a pre-gain term in optimal control. Han et al. (2025) proposed a data-driven modeling framework for globally linearizing highly nonlinear dynamical systems in an elevated infinite-dimensional state space. Yang and Liu (2024) proposed a data-driven mode decomposition algorithm using Koopman operator theory and finite-dimensional approximations of extended dynamics to estimate shape deformations of soft robots. Koopman operator theory offers a novel modeling perspective for nonlinear soft robot systems through global linearization and data-driven approaches, but it faces challenges such as difficulties in designing observation functions and high data requirements.
3.2.5 Others
Neural networks, with their robust nonlinear fitting capability and data-driven nature, are not only applicable to the kinematic modeling of soft robots but are also frequently used for dynamic modeling. Xie et al. (2023) investigated dynamic analysis and response prediction of a hydraulic soft arm using long short-term memory neural networks. Huang et al. (2024b) proposed a hybrid physics-learning modeling method based on the absolute nodal coordinate formulation and multi-layer neural networks. Wu et al. (2025a) combined neural networks with a compact particle swarm optimization algorithm to predict the response of composite material booms. Mamedov et al. (2025), inspired by the pseudo-rigid-body method, introduced a physics-informed neural ordinary differential equation to construct the model. Forghani et al. (2021) utilized deep neural networks to capture the complexity of the dynamics, determining the input–output functional relationship between control inputs and robot trajectories. However, training neural networks requires a large amount of precise data support and demands that the data sufficiently cover the system's motion space. Otherwise, predictions may become distorted, and their black-box nature further leads to poor interpretability.
Numerous scholars have also achieved dynamic modeling of soft robots from other perspectives. Troise et al. (2021) adopted the passive motion paradigms, Han et al. (2021) employed the extended Hamilton principle, Dou et al. (2023) established models based on equilibrium principles with prior deformation configurations, Zhang et al. (2024b) implemented an implicit integration methods based on curved beam models, Wang et al. (2024b) combined virtual power principles and a spring-damper-fluid equivalent method, Ma et al. (2023) used the minimum norm method, Wu et al. (2025b) utilized the absolute nodal coordinate formulation, Li et al. (2024) and Monje et al. (2023) both used the reduced-order method, and Ishigaki et al. (2025) extended the comprehensive dynamic gradient calculation method for rigid-linked systems to achieve the dynamic modeling of soft robots.
After establishing a model to predict the motion of soft robots, it is also necessary to determine which motions should be executed to accomplish the task and which leads to the problem of planning in complex environments. Planning enables robots to make autonomous decisions rather than simply executing preprogrammed fixed actions. Trajectory planning allows robots to adapt to complex and dynamic environments while ensuring safety and reliability; meanwhile, vision is commonly used to achieve trajectory tracking for soft robots.
4.1 Trajectory planning
Trajectory planning determines the efficiency, safety, and stability of task execution. In addition to meeting movement constraints and obstacle avoidance requirements, its planning objectives typically include time optimization, shortest path, and minimum energy consumption.
4.1.1 Obstacle avoidance
Safely avoiding obstacles in dynamic or complex environments is a fundamental requirement of trajectory planning, making obstacle avoidance a research focus in soft robotics planning. Tian et al. (2025) developed an improved dynamic window algorithm based on fuzzy logic for intelligent obstacle avoidance, as shown in Fig. 7a. Lai et al. (2022) investigated robot–obstacle collision avoidance under constrained conditions, as shown in Fig. 7b. Prigozin and Degani (2024) used a genetic algorithm to demonstrate trajectory planning for a manipulator in an environment with fixed obstacles. Xu et al. (2024) proposed a compliant obstacle avoidance algorithm that evaluates robot interaction states based on contact forces. Seleem et al. (2023) achieved active obstacle avoidance for soft robots using an imitation learning framework and human demonstrations.
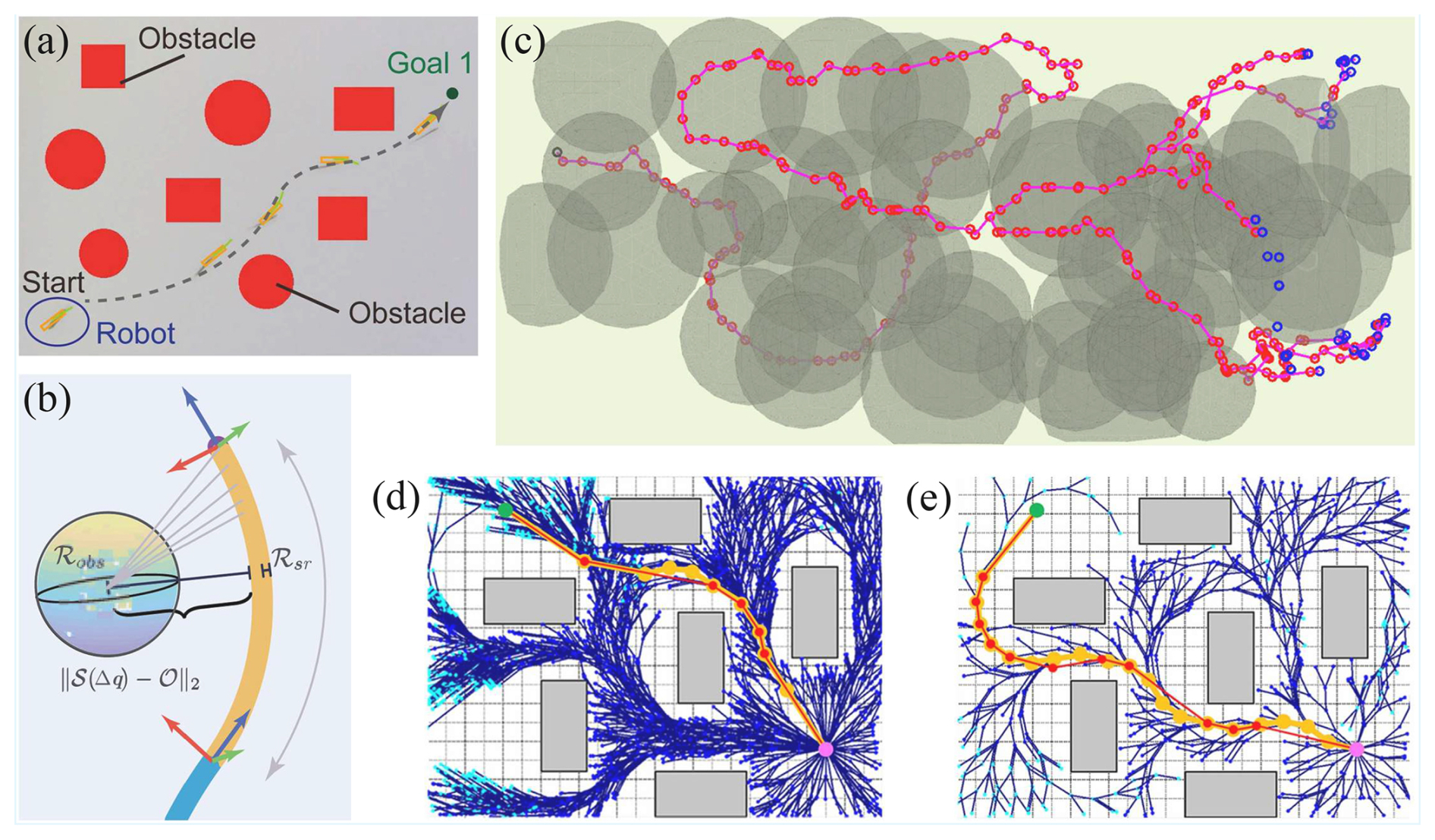
Figure 7Implementation results of the trajectory planning algorithm: (a) automatic navigation in static and obstacle-laden virtual environments (Tian et al., 2025), (b) principle of collision avoidance (Lai et al., 2022), (c) trajectory planning in crowded environments (Gough et al., 2021), (d) RRT∗-based trajectory planning, (e) RRT-based trajectory planning (Satake and Ishii, 2023).
4.1.2 Time optimal
The goal of time optimal is to minimize the time required for the robot to move from the start to the goal while satisfying constraints such as dynamics and joint velocity/acceleration/torque limits. This is particularly useful for tasks requiring rapid responses, such as dynamic interactions or emergency operations. Pilch et al. (2024) solved for purely time-optimal trajectories under given constraints and compared them with trajectories optimized for joint angles and stiffness. The results showed that while the former reduced time, it sacrificed interaction safety and compliance.
4.1.3 Shortest path
Shortest-path planning aims to compute the minimal geometric route from start to goal and is particularly useful in space-constrained or cluttered environments. Shortest-path planning methods are efficient and well suited to static environments but perform poorly in dynamic scenarios and often neglect robot dynamics. Common methods include the Dijkstra algorithm, A∗ algorithm, and RRT∗ algorithm.
Gough et al. (2021) proposed a path planning method for deformable soft robots in cluttered environments. Their approach used 3D Voronoi diagrams and the Dijkstra algorithm to compute optimal paths, balancing costs between robot size, shape variations, and path length, as shown in Fig. 7c. Xu et al. (2022) and Wang et al. (2024a) introduced an obstacle avoidance path planning algorithm based on the A∗ algorithm and experimentally validated the effectiveness of the path planning algorithm and trajectory tracking control. Satake and Ishii (2023) proposed a novel path planning method with constant curvature constraints using the RRT∗ algorithm. The implementation results are shown in Fig. 7d and e: gray rectangles represent obstacles; pink and green nodes denote start and goal points; blue lines connect nodes; and orange and red paths represent the trajectories before and after the removal of unnecessary nodes, respectively. It can be seen that, compared with the standard RRT algorithm, the RRT∗ algorithm has path optimality, can generate shorter paths, and has strong exploration capabilities, although its computation time and complexity are high.
4.1.4 Minimum energy consumption
The objective of minimum energy consumption is to minimize power usage or actuator energy expenditure, making it particularly suitable for long-term operations or energy-constrained scenarios such as deep-sea exploration and inspection. Barbosa et al. (2023) treated electrical energy minimization as the primary optimization target, employing model-based predictive control strategies to compute actuator input signals. Wang et al. (2022) adopted a nonlinear constrained optimization approach to minimize total energy consumption during soft robot tasks. While energy-minimized planning enhances efficiency and reduces mechanical wear, it relies heavily on precise modeling and involves significant computational overhead.
4.2 Visual sensing
To ensure precise motion along predefined trajectories, vision systems are frequently utilized for trajectory tracking in soft robots. The visual module primarily executes three functions: environmental perception, including target object recognition (Taguchi and Sawada, 2025), obstacle detection, and map reconstruction; pose estimation, which uses visual information to reconstruct the soft robot's shape and pose in real time (Morales-Enríquez et al., 2025; Papadakis et al., 2024; Li and Wang, 2024); and motion correction, which adjusts control signals with visual feedback to prevent path deviation and improve accuracy (Chen et al., 2024; Xu et al., 2024; Lai et al., 2021). Notably, Seleem et al. (2023) developed a novel vision-based force sensor to achieve closed-loop grasping force control for soft grippers.
Data-driven methods are widely used in visual perception for soft robots. Zhang et al. (2021a) proposed a bending-sensing algorithm based on image preprocessing and deep learning, training a convolutional neural network with multi-task learning to obtain the bending state of a soft robotic finger. Zhang et al. (2022) trained a convolutional neural network to map visual feedback to the tip pose of the actuator. Rong and Gu (2024) combined a traditional neural network with B-spline curves, capturing external visual images and mapping them to the robot's shape. Additionally, Tanaka et al. (2022) used a recurrent neural network to estimate the pose of a proprioceptive bending sensor. Mao et al. (2024) also implemented multi-modal tactile sensing for a soft robotic finger based on a neural network model. Scharff et al. (2021) employed machine learning to convert signals captured by low-cost sensors into shape parameters of a soft robot.
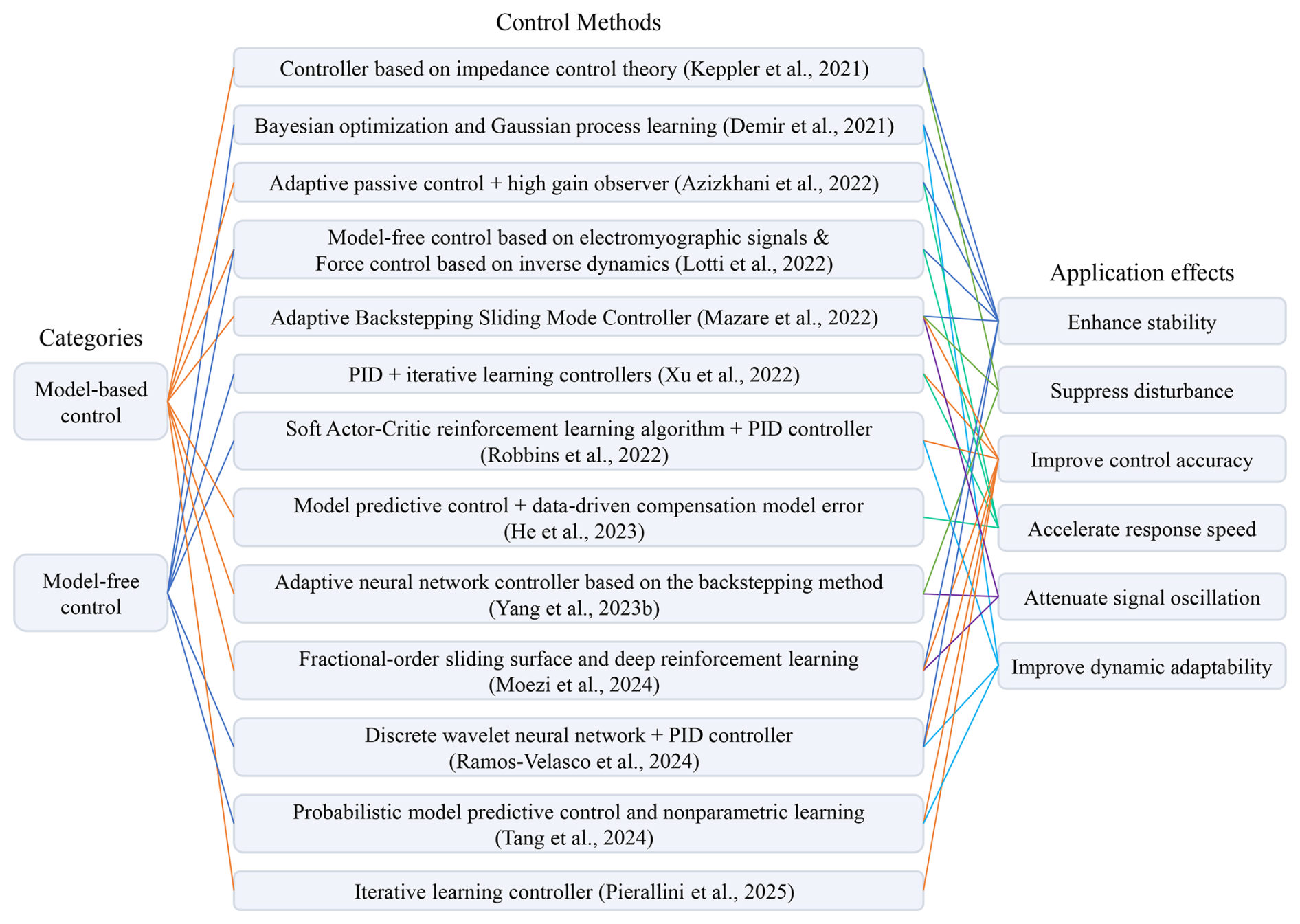
Building upon the previously discussed mechanism, modeling, and planning of soft robots, control should unify and coordinate all elements to enable the robot to execute its intended motions with precision and robustness in real-world environments while compensating for uncertainties and disturbances. Soft robots, characterized by compliant materials, extremely high degrees of freedom, and strong nonlinearities, are difficult to model. Although researchers have achieved the kinematic and dynamic modeling of soft robots using various methods to facilitate the design of model-based controllers, factors such as simplifying assumptions, model simplifications, parametric uncertainties, and external disturbances lead to unmodeled dynamics within the system, posing challenges for control system design. Consequently, control methods that do not rely on models are increasingly being introduced for soft robot control. Some relevant research on both model-based and model-free control are summarized in Fig. 8. It lists specific soft robot control methods from the past 5 years, arranged chronologically. This reveals a growing trend of embedding data-driven approaches into traditional feedback frameworks to form hybrid controllers. Model-based control and model-free control coexist, each with its own advantages and limitations. In terms of application outcomes, enhancing stability and improving tracking accuracy are the two most common performance objectives, reflecting the key challenges in soft robot control.
5.1 Model-based control
Model-based control utilizes internal models to predict robot behavior, thereby computing the control commands needed to achieve desired objectives. This approach offers high control efficiency and eliminates the need for a large number of sample data. Although soft robots present significant modeling challenges and exhibit unmodeled dynamics, researchers have made dedicated efforts and improvements within the model-based control framework. Through technical approaches such as robust control that accounts for uncertainties, adaptive control with online parameter adjustment, and control strategies that integrate data-driven methods, controllers capable of resisting, adapting to, and learning from unmodeled dynamics have been designed, thereby optimizing control performance.
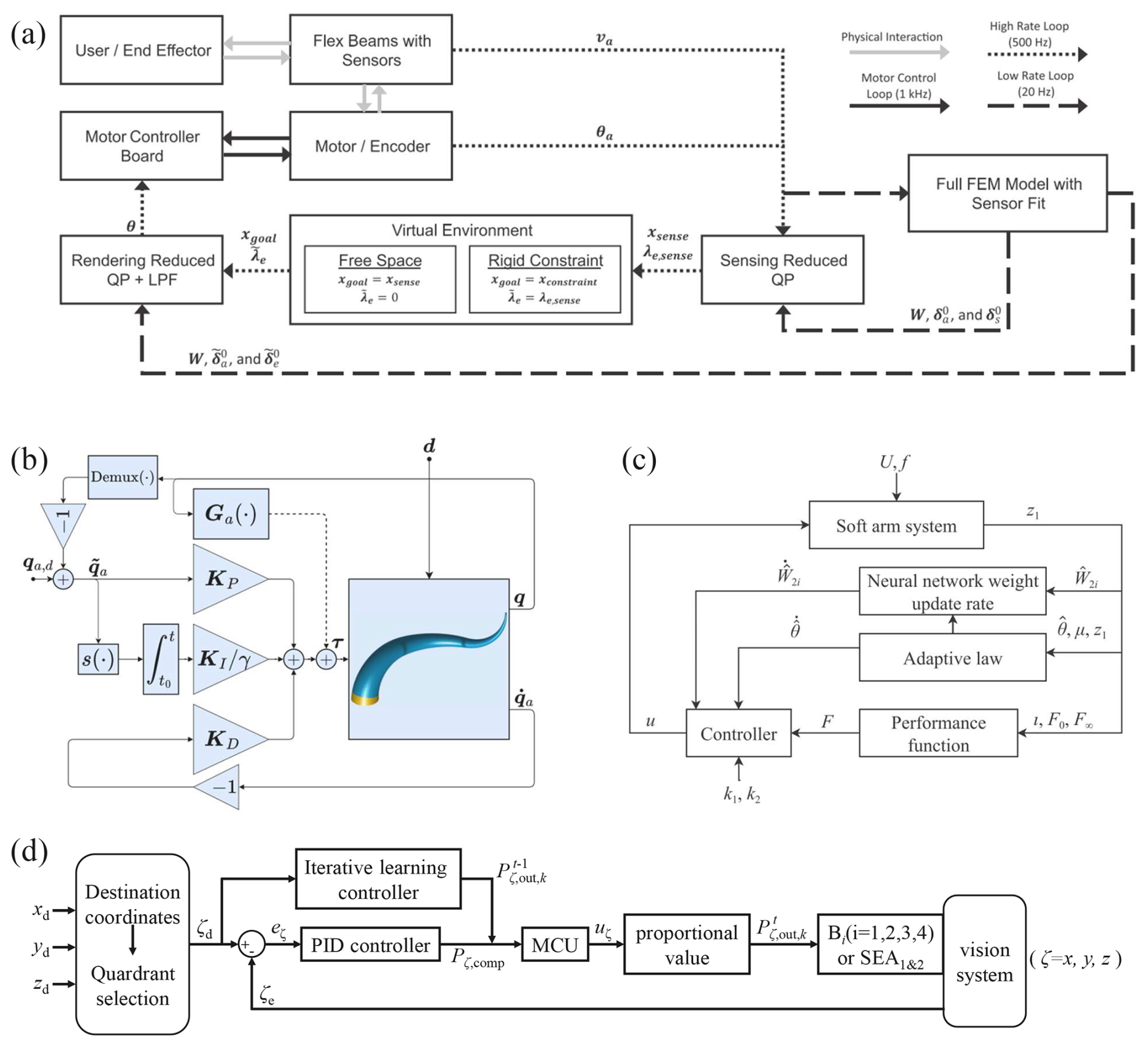
Figure 9System block diagrams of relevant research on soft robot control: (a) multi-rate hierarchical controller (Koehler et al., 2023), (b) PID controller with a saturated integral action (Pustina et al., 2022a), (c) adaptive neural network controller (Yang et al., 2023b), (d) PID and iterative learning controller (Xu et al., 2022).
Shabana and Eldeeb (2021) established the dynamic model of the soft robot based on the absolute nodal coordinate formulation and solved the driving force through inverse dynamics. Li et al. (2022) combined the reduced-order finite element model with the equivalent input disturbance method to achieve coordinated feedforward-feedback-disturbance compensation control, suppressing modeling uncertainties and disturbances. Wu et al. (2022) proposed a control strategy based on finite element dynamics models, combining feedforward with PID feedback to enhance the system's disturbance rejection capability and tracking accuracy. Pustina et al. (2022a) established the dynamic model of the underactuated soft robot and used the P-satI-D shape regulation control law with saturated integral term, which did not require precise stiffness parameters and could suppress constant disturbances. The block diagram of the control structure is shown in Fig. 9b. They (Pustina et al., 2022b) also proposed a PD+ feedback control method with gravity compensation to improve control performance. Troise et al. (2021) combined the pseudo-rigid-body model of the soft robot with elastic statics to achieve compensation for the connecting rod deformation. By implementing feedforward compensation based on the model and combining it with methods such as PID to suppress disturbances, relatively high control accuracy can be achieved in slow-tracking tasks. However, such methods require an accurate model. Otherwise, control precision may be difficult to guarantee. Additionally, their robustness to unmodeled dynamics and sudden external disturbances is limited.
Keppler et al. (2021) established an articulated joint dynamic model for the soft robot and proposed an impedance control scheme, effectively reducing actuator torque requirements during impact. Lotti et al. (2022) compared the torque estimation performance of musculoskeletal models and inverse dynamic models, and computed control commands through an admittance controller. Huang et al. (2023) utilized a pseudo-rigid-body model and employed an admittance force control strategy to achieve safe, compliant, and low-energy-consumption control performance. Koehler et al. (2023) combined the developed nonlinear finite element model with admittance control to execute robot sensing and control at high rates. The control block diagram is shown in Fig. 9a. Impedance/admittance control adjusts the dynamic interaction between the robot and the environment to achieve compliant operation, enhancing system compatibility and safety. It is well suited to tasks involving human-robot interaction or contact with uncertain environments. However, its performance relies on the tuning of impedance/admittance parameters, and its control accuracy is relatively low.
Patterson et al. (2022) proposed a robust control method based on a linear time-invariant system model, integrating singular value decomposition decoupling, PI control, and anti-windup compensation. Shao et al. (2023) addressed robots with system uncertainties and input saturation, achieving constrained shape control through a dynamic model and a sliding-mode controller. Papageorgiou et al. (2024) utilized the dynamic model of the soft robot, employing super-twisting sliding-mode control and an input estimator to achieve position control of the end effector. Cheng et al. (2024) proposed a sliding-mode controller based on a super-twisting extended state observer to robustly control the robot's attitude within a finite time, building upon the dynamic model. Robust control is capable of addressing model uncertainties, parameter variations, and external disturbances, ensuring convergence within a finite time frame while maintaining the stability and precision of the control system. It is suitable for tasks with strong environmental disturbances and high demands on control accuracy and stability. However, its controller design typically requires prior knowledge of the uncertainty bounds, and to guarantee robustness, the controller gains are often set relatively high, which may lead to potential control input chattering.
Mazare et al. (2022) established a pseudo-rigid-body dynamic model for the modular soft robot and employed an adaptive backstepping sliding-mode controller to mitigate the effects of model uncertainties and external disturbances. Alian et al. (2022) developed a dynamic model based on the constant curvature assumption and proposed an adaptive sliding-mode controller to achieve robust curvature tracking control against external disturbances and parametric uncertainties. Monje et al. (2023) combined a decoupled reduced-order dynamic model with a robust fractional-order controller to realize adaptive motion control of the soft robot under model uncertainties. Seleem et al. (2023) proposed a virtual reference adaptive control strategy based on visuo-tactile sensing to achieve closed-loop adaptive force control. Adaptive control enables the online estimation and compensation of unknown or slowly time-varying system parameters, thereby reducing reliance on the accuracy of the initial model. It performs particularly well in scenarios where system parameters are uncertain or difficult to identify precisely offline. However, the proofs of stability and convergence for adaptive control are complex. Furthermore, its convergence speed may be slow, making it difficult to track abrupt parameter changes, and its effectiveness in handling unmodeled dynamics remains limited.
Bruder et al. (2020) constructed data-driven linear and nonlinear dynamic models based on Koopman operator theory and accomplished trajectory tracking control for the soft robot through a model predictive controller. Piqué et al. (2022) established an RNN-based forward dynamic model and proposed a continual learning control method incorporating elastic weight consolidation to accurately control the soft manipulator under varying load conditions. Gan et al. (2022) established a soft-arm kinematic model based on the segmented constant curvature assumption. By employing the Q-learning reinforcement learning method, they achieved motion control with attitude constraints, satisfying task requirements without the need for motion planning. Ju et al. (2023) established a closed-loop control framework based on reinforcement learning and proprioceptive self-sensing, training the control policy through a physical simulation model to achieve coordinated movement of a multi-segment soft robot. He et al. (2023) proposed a data-driven model predictive control method with input mapping based on a system state-space model, reducing the impact of model inaccuracies. Yang et al. (2023b) established a piecewise discrete dynamic model, designed an adaptive controller based on a radial basis function neural network, and combined it with a Lyapunov function to achieve precise trajectory tracking under motion constraints. The system block diagram is shown in Fig. 9c. Zhang et al. (2023) also designed an adaptive learning control method based on a radial basis function neural network on the basis of a reduced-order dynamic model of a soft trunk robot, achieving accurate trajectory tracking of the end effector. Moezi et al. (2024) proposed a control algorithm combining a fractional-order sliding surface and deep reinforcement learning based on a nonlinear dynamic model to achieve trajectory tracking and suppress oscillations. Yang and Liu (2024) compared analytical models and Koopman data-driven models, and realized trajectory tracking using a linear quadratic regulator combined with an unscented Kalman filter. Experiments showed that the system incorporating the Koopman model exhibited superior tracking accuracy and robustness. Meng et al. (2025) adopted an improved particle swarm optimization algorithm to optimize PID parameters for high-precision control, based on a data-driven control model for a pneumatic soft robot. Ghoul et al. (2025) improved the disturbance rejection capability and control accuracy of the soft robot based on a dynamic model and a particle swarm optimization algorithm. Pierallini et al. (2025) used iterative learning control to compensate for model uncertainties and correct errors online based on a flexible rod dynamic model, achieving high-precision control. Combining kinematic or dynamic models with data-driven methods for control can effectively balance tracking accuracy and generalization capabilities, offering flexible performance suitable for tasks requiring high precision, robustness, and adaptive capability. However, this approach involves higher design complexity and still requires a certain number of data for training and learning.
Model-based control features clear theoretical foundations and strong interpretability. Under ideal conditions – accurate models, known environments, and sufficient computational resources – it can achieve high-performance control of soft robots. However, due to its heavy reliance on models and the difficulty in obtaining accurate ones, this approach exhibits limited robustness against model uncertainties and unmodeled dynamics. Additionally, since most models are developed for specific soft robots and are influenced by factors such as structure and materials, and the controllers are designed based on these models, the generality and transferability of such controllers are often poor.
5.2 Model-free control
Model-free control does not rely on prior models. Its core principle involves directly learning the mapping relationship between states and actions from data, enabling it to handle complex tasks. Such controllers inherently avoid the series of issues caused by modeling difficulties, meaning they are insensitive to model uncertainties and exhibit strong adaptability and robustness.
Demir et al. (2021) proposed a data-driven control method based on Bayesian optimization and Gaussian processes, which online learned gait controller parameters and combined transfer learning to achieve adaptive control across different task spaces, improving data efficiency. and generalization. Xu et al. (2022) proposed a model-free closed-loop control system combining PID and iterative learning to achieve end-effector position tracking and improve the response speed for repetitive tasks. The control system block diagram is shown in Fig. 9d. Robbins et al. (2022) proposed a model-agnostic deep reinforcement learning control method, achieving rapid adaptation and generalization through Sim2Real transfer learning, significantly outperforming traditional PID control. Tang et al. (2024) combined feedforward control based on probabilistic model predictive control and feedback control based on a non-parametric learning method, realizing hybrid force/position tracking for the robot. It adapted to unknown environments without requiring precise modeling. Ramos-Velasco et al. (2024) proposed a self-tuning PID control method based on online identification using a discrete wavelet neural network, achieving gain adaptive adjustment and trajectory tracking relying only on position measurements.
Model-free control circumvents the challenges of modeling but introduces its own set of issues, including low sample efficiency, lengthy training times, difficulties in debugging, and poor interpretability. Therefore, in practical applications, the choice between model-based and model-free control often involves trade-offs among factors such as stability, accuracy, and safety.
This paper provides a detailed review of recent research progress in soft robotics regarding structure and actuation, kinematics, and dynamics modeling, as well as control and algorithms. It is observed that current research still faces several challenges. On the one hand, there is a trade-off between modeling accuracy and real-time control capability. High-precision modeling methods, such as the Cosserat rod theory, are computationally complex and often struggle to meet real-time control requirements, while methods like the pseudo-rigid body model improve computational efficiency at the cost of reduced accuracy. On the other hand, kinematics or dynamics models based on data-driven approaches often suffer from poor generalizability and interpretability. Moreover, most data-driven and learning-based control methods tend to focus on demonstrating the effectiveness of intelligent algorithms, while lacking rigorous proofs of convergence and stability. Future research should prioritize the development of lightweight, physics-informed modeling methods that integrate data and physical principles, ensuring both accuracy and real-time control feasibility. Additionally, efforts should be directed toward constructing data-driven control frameworks with theoretical guarantees, thereby enhancing the interpretability and reliability of such algorithms.
With the deepening of interdisciplinary research and technological innovation, soft robot control technology will continue to break new ground, driving its practical application in fields such as medical rehabilitation and precision manipulation. Future research should emphasize the integration of theoretical innovation and engineering practice to achieve the comprehensive development and widespread application of soft robot technology.
The data used in this work are available from the corresponding author upon reasonable request.
Huijun Yu: conceptualization and supervision. Min Lv: investigation and writing (original draft). Bin Hu: investigation. Yang Zhang: investigation. Pengyuan Zhao: writing (review and editing) and visualization.
At least one of the (co-)authors is a member of the editorial board of Mechanical Sciences. The peer-review process was guided by an independent editor, and the authors also have no other competing interests to declare.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. The authors bear the ultimate responsibility for providing appropriate place names. Views expressed in the text are those of the authors and do not necessarily reflect the views of the publisher.
This work was supported by the Shenzhen Science and Technology Program (KCXFZ20240903094011015) and the 2024 “Hundred Doctors-Hundred Enterprises” Initiative (2024H-100171).
This research has been supported by the Shenzhen Science and Technology Program (grant no. KCXFZ20240903094011015) and the 2024 “Hundred Doctors-Hundred Enterprises” Initiative (grant no. 2024H-100171).
This paper was edited by Fulei Ma and reviewed by two anonymous referees.
Alessi, C., Bianchi, D., Stano, G., Cianchetti, M., and Falotico, E.: Pushing with soft robotic arms via deep reinforcement learning, Advanced Intelligent Systems, 6, 2300899, https://doi.org/10.1002/aisy.202300899, 2024. a
Alian, A., Zareinejad, M., and Talebi, H.: Curvature tracking of a two-segmented soft finger using an adaptive sliding-mode controller, IEEE-ASME T. Mech., 28, 50–59, https://doi.org/10.1109/TMECH.2022.3210030, 2022. a
Ambaye, G., Boldsaikhan, E., and Krishnan, K.: Soft Robot Workspace Estimation via Finite Element Analysis and Machine Learning, in: Actuators, MDPI, vol. 14, p. 110, https://doi.org/10.3390/act14030110, 2025. a
An, X., Cui, Y., Sun, H., Shao, Q., and Zhao, H.: Active-cooling-in-the-loop controller design and implementation for an SMA-driven soft robotic tentacle, IEEE T. Robot., 39, 2325–2341, https://doi.org/10.1109/TRO.2023.3234801, 2023. a
Asawalertsak, N., Heims, F., Kovalev, A., Gorb, S. N., Jørgensen, J., and Manoonpong, P.: Frictional anisotropic locomotion and adaptive neural control for a soft crawling robot, Soft Robot., 10, 545–555, https://doi.org/10.1089/soro.2022.0004, 2023. a
Barbosa, A. S., Tahara, L. Z., and da Silva, M. M.: Motion planning of a fish-like piezoelectric actuated robot using model-based predictive control, J. Vib. Control, 29, 411–427, https://doi.org/10.1177/10775463211048255, 2023. a, b
Bordiga, G., Medina, E., Jafarzadeh, S., Bösch, C., Adams, R. P., Tournat, V., and Bertoldi, K.: Automated discovery of reprogrammable nonlinear dynamic metamaterials, Nat. Mater., 23, 1486–1494, https://doi.org/10.1038/s41563-024-02008-6, 2024. a
Bruder, D., Fu, X., Gillespie, R. B., Remy, C. D., and Vasudevan, R.: Data-driven control of soft robots using Koopman operator theory, IEEE T. Robot., 37, 948–961, https://doi.org/10.1109/TRO.2020.3038693, 2020. a
Cai, C. J., Xiao, X., Kalairaj, M. S., Lee, I. J. J., Mugilvannan, A. K., Yeow, B. S., Tan, J. H., Huang, H., and Ren, H.: Diversified and untethered motion generation via crease patterning from magnetically actuated caterpillar-inspired origami robot, IEEE-ASME T. Mech., 26, 1678–1688, https://doi.org/10.1109/TMECH.2020.3028746, 2020. a
Chen, G., Yang, X., Xu, Y., Lu, Y., and Hu, H.: Neural network-based motion modeling and control of water-actuated soft robotic fish, Smart Mater. Struct., 32, 015004, https://doi.org/10.1088/1361-665X/aca456, 2022a. a
Chen, J., Wang, S., Zhao, Q., Huang, W., Chen, M., Hu, J., Wang, Y., and Liu, H.: Stereo Visual Servoing Control of a Soft Endoscope for Upper Gastrointestinal Endoscopic Submucosal Dissection, Micromachines, 15, 276, https://doi.org/10.3390/mi15020276, 2024. a
Chen, P., Yuan, T., Yu, Y., and Liu, Y.: Design and modeling of a novel soft parallel robot driven by endoskeleton pneumatic artificial muscles, Frontiers of Mechanical Engineering, 17, 22, https://doi.org/10.1007/s11465-022-0678-2, 2022b. a
Chen, Y., Wang, L., Galloway, K., Godage, I., Simaan, N., and Barth, E.: Modal-based kinematics and contact detection of soft robots, Soft Robot., 8, 298–309, https://doi.org/10.1089/soro.2019.0095, 2021. a
Cheng, H., Fang, B., Liu, Q., Zhang, J., and Hong, J.: Attitude control for a bionic soft-robotic-ray via a differential flatness theory and a super-twisting algorithm, J. Frankl. Inst., 361, 107093, https://doi.org/10.1016/j.jfranklin.2024.107093, 2024. a
Cheng, P., Jia, J., Ye, Y., and Wu, C.: Modeling of a soft-rigid gripper actuated by a linear-extension soft pneumatic actuator, Sensors, 21, 493, https://doi.org/10.3390/s21020493, 2021. a
Coevoet, E., Adagolodjo, Y., Lin, M., Duriez, C., and Ficuciello, F.: Planning of soft-rigid hybrid arms in contact with compliant environment: Application to the transrectal biopsy of the prostate, IEEE Robotics and Automation Letters, 7, 4853–4860, https://doi.org/10.1109/LRA.2022.3152322, 2022. a, b
Davy, J., Lloyd, P., Chandler, J. H., and Valdastri, P.: A framework for simulation of magnetic soft robots using the material point method, IEEE Robotics and Automation Letters, 8, 3470–3477, https://doi.org/10.1109/LRA.2023.3268016, 2023. a, b
Demir, S. O., Culha, U., Karacakol, A. C., Pena-Francesch, A., Trimpe, S., and Sitti, M.: Task space adaptation via the learning of gait controllers of magnetic soft millirobots, Int. J. Robot. Res., 40, 1331–1351, https://doi.org/10.1177/02783649211021869, 2021. a
Dou, W., Zhong, G., Yang, J., and Shen, J.: Design and modeling of a hybrid soft robotic manipulator with compliant mechanism, IEEE Robotics and Automation Letters, 8, 2301–2308, https://doi.org/10.1109/LRA.2023.3248485, 2023. a
Drotman, D., Jadhav, S., Sharp, D., Chan, C., and Tolley, M. T.: Electronics-free pneumatic circuits for controlling soft-legged robots, Science Robotics, 6, eaay2627, https://doi.org/10.1126/scirobotics.aay2627, 2021. a
Emet, H., Gür, B., and Dede, M. İ. C.: The design and kinematic representation of a soft robot in a simulation environment, Robotica, 42, 139–152, https://doi.org/10.1017/S026357472300139X, 2024. a
Escribano-Huesca, A., Gila-Vilchez, C., Amaro-da Cruz, A., Leon-Cecilla, A., Palomo, M. G., Ortiz-Ruiz, S., Ruiz, F. G., Moya-Ramirez, I., Lopez-Lopez, M. T., and Rodriguez-Arco, L.: Dynamically Reconfigurable Micro-Patterned Hydrogels Based on Magnetic Pickering Emulsion Droplets, Macromol. Rapid Comm., 45, 2400242, https://doi.org/10.1002/marc.202400242, 2024. a
Fan, W., Wang, J., Zhang, Z., Chen, G., and Wang, H.: Vacuum-driven parallel continuum robots with self-sensing origami linkages, IEEE-ASME T. Mech., 29, 3370–3380, https://doi.org/10.1109/TMECH.2023.3340152, 2024. a, b
Feliu-Talegon, D., Mathew, A. T., Alkayas, A. Y., Adamu, Y. A., and Renda, F.: Dynamic shape estimation of tendon-driven soft manipulators via actuation readings, IEEE Robotics and Automation Letters, https://doi.org/10.1109/LRA.2024.3511406, 2024. a, b
Fernandez-Bussy, S., Chandra, N. C., Koratala, A., Lee-Mateus, A. Y., Barrios-Ruiz, A., Garza-Salas, A., Koirala, T., Funes-Ferrada, R., Balasubramanian, P., Patel, N. M., Chadha, R., Hazelett, B. N., Robertson, K. S., Reisenauer, J., and Abia-Trujillo, D.: Robotic-assisted bronchoscopy: a narrative review of systems, J. Thorac. Dis., 16, 5422, https://doi.org/10.21037/jtd-24-456, 2024. a
Forghani, M., Huang, W., and Jawed, M. K.: Control of uniflagellar soft robots at low reynolds number using buckling instability, J. Dyn. Syst., 143, 061004, https://doi.org/10.1115/1.4049548, 2021. a
Gan, Y., Li, P., Jiang, H., Wang, G., Jin, Y., Chen, X., and Ji, J.: A reinforcement learning method for motion control with constraints on an HPN Arm, IEEE Robotics and Automation Letters, 7, 12006–12013, https://doi.org/10.1109/LRA.2022.3196789, 2022. a
Ghoul, A., Djeffal, S., Wang, H., Kara, K., and Hadjili, M. L.: Enhancing Surgical Robotics: A Dynamic Model and Optimized Control Strategy for Cable-Driven Continuum Robots, J. Mech. Robot., 17, https://doi.org/10.1115/1.4065698, 2025. a
Gough, E., Conn, A. T., and Rossiter, J.: Planning for a tight squeeze: Navigation of morphing soft robots in congested environments, IEEE Robotics and Automation Letters, 6, 4752–4757, https://doi.org/10.1109/LRA.2021.3067594, 2021. a, b
Guo, Q., Wei, J., Yu, S., Feng, X., Gao, Z., Wang, R., Yu, H., Ge, Z., and Yang, W.: Soft robots with different movement capabilities based on photo-responsive multilayer poly (N-isopropylacrylamide) and multi-walled carbon nanotubes, J. Colloid Interf. Sci., 690, 137351, https://doi.org/10.1016/j.jcis.2025.137351, 2025a. a
Guo, Y., Zhu, J., Wang, Y., Zhang, L., Wang, S., Dou, B., Yang, S., Li, B., Niu, F., and Hao, C.: Sea Turtle-inspired Magnetic Soft Robot Demonstrates Versatile Land-to-Submerged Locomotion, J. Bionic Eng., 1–10, https://doi.org/10.1007/s42235-025-00700-0, 2025b. a
Haggerty, D. A., Banks, M. J., Kamenar, E., Cao, A. B., Curtis, P. C., Mezić, I., and Hawkes, E. W.: Control of soft robots with inertial dynamics, Science Robotics, 8, eadd6864, https://doi.org/10.1126/scirobotics.add6864, 2023. a
Han, L., Peng, K., Chen, W., and Liu, Z.: A Data-driven Koopman Modeling Framework With Application to Soft Robots, Int. J. Control Autom., 23, 249–261, https://doi.org/10.1007/s12555-023-0517-1, 2025. a
Han, Z., Liu, Z., He, W., and Li, G.: Distributed parameter modeling and boundary control of an octopus tentacle-inspired soft robot, IEEE T. Contr. Syst. T., 30, 1244–1256, https://doi.org/10.1109/TCST.2021.3104648, 2021. a, b, c
He, S., Sun, L., Xu, Y., and Li, D.: A modeling and data-driven control framework for rigid-soft hybrid robot with visual servoing, IEEE Robotics and Automation Letters, 8, 7281–7288, https://doi.org/10.1109/LRA.2023.3318118, 2023. a, b
Huang, A., Cao, Y., Guo, J., Fang, Z., Su, Y., Liu, S., Yi, J., Wang, H., Dai, J. S., and Wang, Z.: Foam-embedded soft robotic joint with inverse kinematic modeling by iterative self-improving learning, IEEE Robotics and Automation Letters, 9, 1756–1763, https://doi.org/10.1109/LRA.2024.3349831, 2024a. a
Huang, P., Wang, Y., Wu, J., Su, C.-Y., Noda, R., and Fukushima, E. F.: Modeling and Control of Dielectric Elastomer Actuator Based on T–S Fuzzy Model Framework and LMI Theory, Int. J. Fuzzy Syst., 1–13, https://doi.org/10.1007/s40815-024-01911-z, 2025. a
Huang, X., Zhu, X., and Gu, G.: Kinematic modeling and characterization of soft parallel robots, IEEE T. Robot., 38, 3792–3806, https://doi.org/10.1109/TRO.2022.3174474, 2022. a
Huang, X., Rong, Y., and Gu, G.: High-Precision Dynamic Control of Soft Robots With the Physics-Learning Hybrid Modeling Approach, IEEE-ASME T. Mech., https://doi.org/10.1109/TMECH.2024.3403151, 2024b. a
Huang, Y., Ma, R., and Liu, H.: A hybrid force-magnetic control scheme for flexible medical device steering, Mechatronics, 95, 103072, https://doi.org/10.1016/j.mechatronics.2023.103072, 2023. a, b
Ishigaki, T., Ayusawa, K., and Yamamoto, K.: Unified Framework of Gradient Computation for Hybrid-link System and its Dynamical Simulation by Implicit Method, IEEE Robotics and Automation Letters, https://doi.org/10.1109/LRA.2025.3548497, 2025. a
Ju, H., Cha, B., Rus, D., and Lee, J.: Closed-Loop Soft Robot Control Frameworks with Coordinated Policies Based on Reinforcement Learning and Proprioceptive Self-Sensing, Adv. Funct. Mater., 33, 2304642, https://doi.org/10.1002/adfm.202304642, 2023. a
Kalibala, A., Nada, A. A., Ishii, H., and El-Hussieny, H.: Dynamic modelling and predictive position/force control of a plant-inspired growing robot, Bioinspir. Biomim., 20, 016005, https://doi.org/10.1088/1748-3190/ad8e25, 2024. a, b
Keppler, M., Loeffl, F., Wandinger, D., Raschel, C., and Ott, C.: Analyzing the performance limits of articulated soft robots based on the ESPi framework: Applications to damping and impedance control, IEEE Robotics and Automation Letters, 6, 7121–7128, https://doi.org/10.1109/LRA.2021.3097079, 2021. a
Koehler, M., Bieze, T. M., Kruszewski, A., Okamura, A. M., and Duriez, C.: Modeling and control of a 5-DOF parallel continuum haptic device, IEEE T. Robot., 39, 3636–3654, https://doi.org/10.1109/TRO.2023.3277068, 2023. a, b
Kong, F., Zhu, Y., Yang, C., Jin, H., Zhao, J., and Cai, H.: Integrated locomotion and deformation of a magnetic soft robot: Modeling, control, and experiments, IEEE T. Ind. Electron., 68, 5078–5087, https://doi.org/10.1109/TIE.2020.2992000, 2020. a
Koopman, B. O.: Hamiltonian systems and transformation in Hilbert space, P. Natl. Acad. Sci. USA, 17, 315–318, https://doi.org/10.1073/pnas.17.5.315, 1931. a
Kugelstadt, T. and Schömer, E.: Position and orientation based Cosserat rods, in: Symposium on Computer Animation, vol. 11, 169–178, https://dl.acm.org/doi/10.5555/2982818.2982842 (last access: 9 March 2026), 2016. a
Lai, J., Huang, K., Lu, B., Zhao, Q., and Chu, H. K.: Verticalized-tip trajectory tracking of a 3D-printable soft continuum robot: Enabling surgical blood suction automation, IEEE-ASME T. Mech., 27, 1545–1556, https://doi.org/10.1109/TMECH.2021.3090838, 2021. a
Lai, J., Lu, B., Zhao, Q., and Chu, H. K.: Constrained motion planning of a cable-driven soft robot with compressible curvature modeling, IEEE Robotics and Automation Letters, 7, 4813–4820, https://doi.org/10.1109/LRA.2022.3152318, 2022. a, b, c
Li, N., Li, F., Yang, H., and Peng, H.: Real-time control of a soft manipulator based on reduced order extended position-based dynamics, Mech. Mach. Theory, 202, 105774, https://doi.org/10.1016/j.mechmachtheory.2024.105774, 2024. a
Li, P., Zhang, Y., Zhang, G., Zhou, D., and Li, L.: A bioinspired soft robot combining the growth adaptability of vine plants with a coordinated control system, Research, 9843859, https://doi.org/10.34133/2021/9843859, 2021. a
Li, Q., Chen, T., Chen, Y., and Wang, Z.: An underwater bionic crab soft robot with multidirectional controllable motion ability, Ocean Eng., 278, 114412, https://doi.org/10.1016/j.oceaneng.2023.114412, 2023a. a
Li, S., Kruszewski, A., Guerra, T.-M., and Nguyen, A.-T.: Equivalent-input-disturbance-based dynamic tracking control for soft robots via reduced-order finite-element models, IEEE-ASME T. Mech., 27, 4078–4089, https://doi.org/10.1109/TMECH.2022.3144353, 2022. a, b
Li, S., Nguyen, A.-T., Guerra, T.-M., and Kruszewski, A.: Reduced-order model based dynamic tracking for soft manipulators: Data-driven lpv modeling, control design and experimental results, Control Eng. Pract., 138, 105618, https://doi.org/10.1016/j.conengprac.2023.105618, 2023b. a
Li, S., Abdelaziz, S., Wang, L., and Hao, G.: Design and kinetostatic analysis of a tip-stiffness improved compliant continuum robot using anti-buckling universal joints, Int. J. Robot. Res., 02783649251344328, https://doi.org/10.1177/02783649251344328, 2025. a
Li, X. and Wang, D.: Feedback Control of a Dielectric-Elastomer Soft Robot Using Modified Dubins Path Planning, IEEE-ASME T. Mech., https://doi.org/10.1109/TMECH.2024.3427112, 2024. a, b
Li, Z. and Xu, Q.: Multi-Section Magnetic Soft Robot with Multirobot Navigation System for Vasculature Intervention, Cyborg and Bionic Systems, 5, 0188, https://doi.org/10.34133/cbsystems.0188, 2024. a
Liu, J., Jiang, D., Li, Z., He, J., Jian, L., Wang, H., Wen, G., Wang, Z.-P., and Xie, Y. M.: On the nonlinear dynamic performance of a novel bistability-driven soft robot, Adv. Eng. Softw., 206, 103940, https://doi.org/10.1016/j.advengsoft.2025.103940, 2025a. a
Liu, J., Ma, G., Zhang, T., Shan, X., Kang, R., Zheng, R., and Liu, H.: Untethered Soft Crawling Robot Based on Origami Inspired Soft-rigid Hybrid Actuator, J. Bionic Eng., 22, 1071–1084, https://doi.org/10.1007/s42235-025-00682-z, 2025b. a
Liu, W., Duo, Y., Liu, J., Yuan, F., Li, L., Li, L., Wang, G., Chen, B., Wang, S., Yang, H., Liu, Y., Mo, Y., Wang, Y., Fang, B., Sun, F., Ding, X., Zhang, C., and Wen, L.: Touchless interactive teaching of soft robots through flexible bimodal sensory interfaces, Nat. Commun., 13, 5030, https://doi.org/10.1038/s41467-022-32702-5, 2022. a
Liu, Y., Zhang, Y., Dai, X., Wu, R., Zhang, Z., Li, Y., and Zhao, J.: SUTBot: A Soft Umbrella-like Tensegrity Robot with Elastic Struts for In-pipe Locomotion, IEEE Robotics and Automation Letters, https://doi.org/10.1109/LRA.2025.3537866, 2025c. a, b
Long, Y., Zhang, Z., Xu, Z., Gu, E., Lu, Q., Wang, H., and Chen, G.: Lightweight and powerful vacuum-driven gripper with bioinspired elastic spine, IEEE Robotics and Automation Letters, 8, 8136–8143, https://doi.org/10.1109/LRA.2023.3325714, 2023. a
Lotti, N., Xiloyannis, M., Missiroli, F., Bokranz, C., Chiaradia, D., Frisoli, A., Riener, R., and Masia, L.: Myoelectric or force control? A comparative study on a soft arm exosuit, IEEE T. Robot., 38, 1363–1379, https://doi.org/10.1109/TRO.2021.3137748, 2022. a
Lu, X., Xu, W., and Li, X.: Modeling of a soft robotic tongue driven by compressed air, IEEE Access, 11, 61901–61913, https://doi.org/10.1109/ACCESS.2023.3287648, 2023. a, b
Ma, F., Bai, R., Chen, G., and Awtar, S.: Nonlinear Complementary Strain Energy Formulation for Planar Beam Flexures Undergoing Intermediate Deflection, J. Mech. Design, 147, 084501, https://doi.org/10.1115/1.4067869, 2025. a
Ma, J., Han, Z., Liu, Z., Li, G., He, W., and Ge, S. S.: Modeling and control of an octopus inspired soft arm under prescribed spatial motion constraints, J. Intell. Robot. Syst., 109, 94, https://doi.org/10.1007/s10846-023-02026-7, 2023. a
Mamedov, S., Geist, A. R., Viljoen, R., Trimpe, S., and Swevers, J.: Learning deformable linear object dynamics from a single trajectory, IEEE Robotics and Automation Letters, https://doi.org/10.1109/LRA.2025.3577421, 2025. a
Mao, B., Zhou, K., Xiang, Y., Zhang, Y., Yuan, Q., Hao, H., Chen, Y., Liu, H., Wang, X., Wang, X., and Qu, J.: A bioinspired robotic finger for multimodal tactile sensing powered by fiber optic sensors, Advanced Intelligent Systems, 6, 2400175, https://doi.org/10.1002/aisy.202400175, 2024. a
Matia, Y., Kaiser, G. H., Shepherd, R. F., Gat, A. D., Lazarus, N., and Petersen, K. H.: Harnessing nonuniform pressure distributions in soft robotic actuators, Advanced Intelligent Systems, 5, 2200330, https://doi.org/10.1002/aisy.202200330, 2023. a
Mazare, M., Tolu, S., and Taghizadeh, M.: Adaptive variable impedance control for a modular soft robot manipulator in configuration space, Meccanica, 57, 1–15, https://doi.org/10.1007/s11012-021-01436-x, 2022. a
Mendoza, N. and Haghshenas-Jaryani, M.: Combined soft grasping and crawling locomotor robot for exterior navigation of tubular structures, Machines, 12, 157, https://doi.org/10.3390/machines12030157, 2024. a
Meng, H., Zhou, C., Yang, X., Zhao, P., and Zhang, W.: Design and control of a novel pneumatic soft robot based on the improved particle swarm optimization algorithm, PloS One, 20, e0333187, https://doi.org/10.1371/journal.pone.0333187, 2025. a
Moezi, S. A., Sedaghati, R., and Rakheja, S.: Nonlinear dynamic modeling and model-based AI-driven control of a magnetoactive soft continuum robot in a fluidic environment, ISA T., 144, 245–259, https://doi.org/10.1016/j.isatra.2023.10.030, 2024. a
Monje, C. A., Deutschmann, B., Muñoz, J., Ott, C., and Balaguer, C.: Fractional order control of continuum soft robots: Combining decoupled/reduced-dynamics models and robust fractional order controllers for complex soft robot motions, IEEE Contr. Syst. Mag., 43, 66–99, https://doi.org/10.1109/MCS.2023.3253420, 2023. a, b
Morales-Enríquez, D. A., Guzmán-López, J., Aguilar-Ramírez, R. A., Lorenzo-Martínez, J. L., Sapién-Garza, D., Cortez, R., Lozada-Castillo, N., and Luviano-Juárez, A.: Data-Based Modeling and Control of a Single Link Soft Robotic Arm, Biomimetics, 10, 294, https://doi.org/10.3390/biomimetics10050294, 2025. a, b, c
Morasso, P.: A computational model of hybrid trunk-like robots for synergy formation in anticipation of physical interaction, Biomimetics, 10, 21, https://doi.org/10.3390/biomimetics10010021, 2025. a
Ochoa, O., Méndez, E., Perez-Santiago, R., Cuan-Urquizo, E., Sandoval-Castro, X. Y., and González, A.: Reconfigurable Soft Pneumatic Actuators with Metamaterial Reinforcements: Tunable Stiffness and Deformation Modes, Mater. Design, 113649, https://doi.org/10.1016/j.matdes.2025.113649, 2025. a, b
Papadakis, E., Tsakiris, D. P., and Sfakiotakis, M.: An Octopus-Inspired Soft Pneumatic Robotic Arm, Biomimetics, 9, 773, https://doi.org/10.3390/biomimetics9120773, 2024. a, b
Papageorgiou, D., Sigurðardóttir, G. Þ., Falotico, E., and Tolu, S.: Sliding-mode control of a soft robot based on data-driven sparse identification, Control Eng. Pract, 144, 105836, https://doi.org/10.1016/j.conengprac.2023.105836, 2024. a
Patterson, Z. J., Sabelhaus, A. P., and Majidi, C.: Robust control of a multi-axis shape memory alloy-driven soft manipulator, IEEE Robotics and Automation Letters, 7, 2210–2217, https://doi.org/10.1109/LRA.2022.3143256, 2022. a
Patterson, Z. J., Astley, H. C., and Majidi, C.: Soft robotic brittle star shows the influence of mass distribution on underwater walking, Bioinspir. Biomim., 20, 036003, https://doi.org/10.1088/1748-3190/adbecb, 2025. a
Pierallini, M., Gopanunni, R. K. M., Angelini, F., Bicchi, A., and Garabini, M.: Fishing for data: Modeling, optimal planning, and iterative learning control for flexible link robots, IEEE T. Contr. Syst. T., https://doi.org/10.1109/TCST.2025.3550030, 2025. a
Pilch, S., Klug, D., and Sawodny, O.: Optimal Interaction-friendly Trajectory Generation of a Pneumatic Soft Continuum Manipulator, in: 2024 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), 1189–1196, IEEE, https://doi.org/10.1109/AIM55361.2024.10637105, 2024. a
Piqué, F., Kalidindi, H. T., Fruzzetti, L., Laschi, C., Menciassi, A., and Falotico, E.: Controlling soft robotic arms using continual learning, IEEE Robotics and Automation Letters, 7, 5469–5476, https://doi.org/10.1109/LRA.2022.3157369, 2022. a
Prigozin, A. and Degani, A.: Interacting with Obstacles Using a Bio-Inspired, Flexible, Underactuated Multilink Manipulator, Biomimetics, 9, 86, https://doi.org/10.3390/biomimetics9020086, 2024. a
Pustina, P., Borja, P., Della Santina, C., and De Luca, A.: P-satI-D shape regulation of soft robots, IEEE Robotics and Automation Letters, 8, 1–8, https://doi.org/10.1109/LRA.2022.3221304, 2022a. a, b
Pustina, P., Della Santina, C., and De Luca, A.: Feedback regulation of elastically decoupled underactuated soft robots, IEEE Robotics and Automation Letters, 7, 4512–4519, https://doi.org/10.1109/LRA.2022.3150829, 2022b. a
Ramos-Velasco, L., Parra-Vega, V., García-Rodríguez, R., Vega-Navarrete, M., Trejo-Ramos, C., and Olguín-Díaz, E.: Knowledge-based self-tuning of PID control gains for continuum soft robots, Eng. Appl. Artif. Intel., 133, 108447, https://doi.org/10.1016/j.engappai.2024.108447, 2024. a
Rao, P., Peyron, Q., and Burgner-Kahrs, J.: Shape representation and modeling of tendon-driven continuum robots using euler arc splines, IEEE Robotics and Automation Letters, 7, 8114–8121, https://doi.org/10.1109/LRA.2022.3185377, 2022. a, b
Rao, P., Pogue, C., Peyron, Q., Diller, E., and Burgner-Kahrs, J.: Modeling and analysis of tendon-driven continuum robots for rod-based locking, IEEE Robotics and Automation Letters, 8, 3126–3133, https://doi.org/10.1109/LRA.2023.3264869, 2023. a
Robbins, A. S., Ho, M., and Teodorescu, M.: Model-free dynamic control of robotic joints with integrated elastic ligaments, Robotics and Autonomous Systems, 155, 104150, https://doi.org/10.1016/j.robot.2022.104150, 2022. a
Rong, Y. and Gu, G.: Vision-based real-time shape estimation of self-occluding soft parallel robots using neural networks, IEEE Robotics and Automation Letters, 9, 7349–7356, https://doi.org/10.1109/LRA.2024.3421794, 2024. a
Roshanfar, M., Dargahi, J., and Hooshiar, A.: Cosserat rod-based dynamic modeling of a hybrid-actuated soft robot for robot-assisted cardiac ablation, in: Actuators, MDPI, vol. 13, p. 8, https://doi.org/10.3390/act13010008, 2023. a, b, c
Satake, Y. and Ishii, H.: Path planning method with constant bending angle constraint for soft growing robot using heat welding mechanism, IEEE Robotics and Automation Letters, 8, 2836–2843, https://doi.org/10.1109/LRA.2023.3260705, 2023. a, b
Sayahkarajy, M., Witte, H., and Faudzi, A. A. M.: Chorda dorsalis system as a paragon for soft medical robots to design echocardiography probes with a new SOM-based steering control, Biomimetics, 9, 199, https://doi.org/10.3390/biomimetics9040199, 2024. a
Scharff, R. B., Fang, G., Tian, Y., Wu, J., Geraedts, J. M., and Wang, C. C.: Sensing and reconstruction of 3-D deformation on pneumatic soft robots, IEEE-ASME T. Mech., 26, 1877–1885, https://doi.org/10.1109/TMECH.2021.3078263, 2021. a
Seleem, I. A., El-Hussieny, H., and Ishii, H.: Imitation-based motion planning and control of a multi-section continuum robot interacting with the environment, IEEE Robotics and Automation Letters, 8, 1351–1358, https://doi.org/10.1109/LRA.2023.3239306, 2023. a, b, c, d
Shabana, A. A. and Eldeeb, A. E.: Motion and shape control of soft robots and materials, Nonlinear Dynam., 104, 165–189, https://doi.org/10.1007/s11071-021-06272-y, 2021. a
Shao, X., Pustina, P., Stölzle, M., Sun, G., De Luca, A., Wu, L., and Della Santina, C.: Model-based control for soft robots with system uncertainties and input saturation, IEEE T. Ind. Electron., 71, 7435–7444, https://doi.org/10.1109/TIE.2023.3303636, 2023. a
Shen, Y. and Zou, Y.: Contact Dynamic Behaviors of Magnetic Hydrogel Soft Robots, Gels, 11, 20, https://doi.org/10.3390/gels11010020, 2024. a, b
Shi, R., Fang, H., and Xu, J.: Continuum modeling and dynamics of earthworm-like peristaltic locomotion, J. Mech. Phys. Solids, 196, 106034, https://doi.org/10.1016/j.jmps.2025.106034, 2025. a
Soon, R. H., Yin, Z., Dogan, M. A., Dogan, N. O., Tiryaki, M. E., Karacakol, A. C., Aydin, A., Esmaeili-Dokht, P., and Sitti, M.: Pangolin-inspired untethered magnetic robot for on-demand biomedical heating applications, Nat. Commun., 14, 3320, https://doi.org/10.1038/s41467-023-38689-x, 2023. a
Sun, X., Nose, A., and Kohsaka, H.: A vacuum-actuated soft robot inspired by Drosophila larvae to study kinetics of crawling behaviour, Plos One, 18, e0283316, https://doi.org/10.1371/journal.pone.0283316, 2023. a
Taguchi, R. and Sawada, Y.: Autonomous grasping system with a tendon parallel manipulator consisting of rib-reinforced vacuum-driven linear actuators and a soft robot hand with a time-of-flight camera, Adv. Robotics, 1–16, https://doi.org/10.1080/01691864.2025.2508783, 2025. a, b
Tanaka, K., Minami, Y., Tokudome, Y., Inoue, K., Kuniyoshi, Y., and Nakajima, K.: Continuum-body-pose estimation from partial sensor information using recurrent neural networks, IEEE Robotics and Automation Letters, 7, 11244–11251, https://doi.org/10.1109/LRA.2022.3199034, 2022. a
Tang, Z., Xin, W., Wang, P., and Laschi, C.: Learning-based control for soft robot–environment interaction with force/position tracking capability, Soft Robot., 11, 767–778, https://doi.org/10.1089/soro.2023.0116, 2024. a
Tao, J., Li, T., Hu, Q., and Dong, E.: Soft Origami Continuum Robot Capable of Precise Motion through Machine Learning, IEEE Robotics and Automation Letters, https://doi.org/10.1109/LRA.2024.3518106, 2024. a
Tian, C., Fan, X., Jia, J., Yang, Z., and Xie, H.: An automatic navigation framework for magnetic fish-like millirobot in uncertain dynamic environments, IEEE Robotics and Automation Letters, https://doi.org/10.1109/LRA.2025.3531150, 2025. a, b
Troeung, C., Liu, S., and Chen, C.: Modelling of tendon-driven continuum robot based on constraint analysis and pseudo-rigid body model, IEEE Robotics and Automation Letters, 8, 989–996, https://doi.org/10.1109/LRA.2023.3234821, 2023. a, b
Troise, M., Gaidano, M., Palmieri, P., and Mauro, S.: Preliminary analysis of a lightweight and deployable soft robot for space applications, Appl. Sci., 11, 2558, https://doi.org/10.3390/app11062558, 2021. a, b
Wan, Z., Sun, Y., Qin, Y., Skorina, E. H., Gasoto, R., Luo, M., Fu, J., and Onal, C. D.: Design, analysis, and real-time simulation of a 3D soft robotic snake, Soft Robot., 10, 258–268, https://doi.org/10.1089/soro.2021.0144, 2023. a
Wang, C., Wang, T., Li, M., Zhang, R., Ugurlu, H., and Sitti, M.: Heterogeneous multiple soft millirobots in three-dimensional lumens, Science Advances, 10, eadq1951, https://doi.org/10.1126/sciadv.adq1951, 2024a. a
Wang, J., Li, Y., Tian, S., Zhao, Y., Ren, G., Xi, F., and Zhao, Y.: Bio-inspired rigid-flexible coupled skin-scales system for enhanced protection in soft robotic fish, npj Robotics, 3, 35, https://doi.org/10.1038/s44182-025-00052-1, 2025a. a
Wang, K., Wang, X., Ho, J. D.-L., Fang, G., Zhu, B., Xie, R., Liu, Y.-H., Au, K. W. S., Chan, J. Y.-K., and Kwok, K.-W.: A fast soft robotic laser sweeping system using data-driven modeling approach, IEEE T. Robot., 39, 3043–3058, https://doi.org/10.1109/TRO.2023.3262118, 2023. a
Wang, T., Yao, S., and Zhu, S.: Energy-saving trajectory optimization of a fluidic soft robotic arm, Smart Mater. Struct., 31, 115011, https://doi.org/10.1088/1361-665X/ac9768, 2022. a
Wang, T., Wang, X., Fu, G., and Lu, C.: A dynamic modeling method for soft pneumatic robotic arms considering both geometric nonlinearity and visco-hyperelasticity, Int. J. Struct. Stab. Dy., 24, 2450271, https://doi.org/10.1142/S0219455424502717, 2024b. a
Wang, X., Lin, A., Yuan, W., Hu, H., Cheng, G., and Ding, J.: Design of an actuator with bionic claw hook–suction cup hybrid structure for soft robot, Bioinspir. Biomim., 19, 036021, https://doi.org/10.1088/1748-3190/ad3ff7, 2024c. a
Wang, Z., Bhattacharjee, A., Duygu, Y. C., Lee, S., Jabbarzadeh, M., Fu, H. C., and Kim, M. J.: Design, modeling, and control of magnetically actuated rod-like soft robots: Propulsion in free space with viscous fluids and navigation in confined geometries, Sensor. Actuat. A-Phys., 387, 116305, https://doi.org/10.1016/j.sna.2025.116305, 2025b. a
Wei, F., Luo, K., Zhang, Y., and Jiang, J.: Structural Design and Kinematic Analysis of Cable-Driven soft robot, in: Actuators, MDPI, vol. 13, p. 497, https://doi.org/10.3390/act13120497, 2024. a, b, c
Wiese, M., Berthold, R., Wangenheim, M., and Raatz, A.: Describing and analyzing mechanical contact for continuum robots using a shooting-based cosserat rod implementation, IEEE Robotics and Automation Letters, 9, 1668–1675, https://doi.org/10.1109/LRA.2023.3346272, 2023. a
Wockenfuß, W. R., Brandt, V., Weisheit, L., and Drossel, W.-G.: Design, modeling and validation of a tendon-driven soft continuum robot for planar motion based on variable stiffness structures, IEEE Robotics and Automation Letters, 7, 3985–3991, https://doi.org/10.1109/LRA.2022.3149031, 2022. a
Wu, C., Zhang, R., Tang, F., Zhao, P., Li, L., and Zhang, D.: Simulation-data-driven vibration optimization of deployable stepwise composite booms, Alexandria Engineering Journal, 114, 440–452, https://doi.org/10.1016/j.aej.2024.11.085, 2025a. a
Wu, C., Zhao, P., Chen, P., Ni, Z., Yue, S., Li, L., Zhang, D., and Hao, G.: Design, dynamic modelling and experimental study on a tether-net system for active debris removal, Mech. Mach. Theory, 208, 105958, https://doi.org/10.1016/j.mechmachtheory.2025.105958, 2025b. a
Wu, K., Zheng, G., and Zhang, J.: FEM-based trajectory tracking control of a soft trunk robot, Robot. Auton. Syst., 150, 103961, https://doi.org/10.1016/j.robot.2021.103961, 2022. a
Xiao, Q., Musa, M., Godage, I. S., Su, H., and Chen, Y.: Kinematics and stiffness modeling of soft robot with a concentric backbone, J. Mech. Robot., 15, 051011, https://doi.org/10.1115/1.4055860, 2023. a, b
Xie, Q., Wang, T., and Zhu, S.: Simplified dynamical model and experimental verification of an underwater hydraulic soft robotic arm, Smart Mater. Struct., 31, 075 011, https://doi.org/10.1088/1361-665X/ac736f, 2022. a
Xie, Q., Zhang, Y., Wang, T., and Zhu, S.: Dynamic response prediction of hydraulic soft robotic arms based on LSTM neural network, P. I. Mech. Eng. I-J. Sys., 237, 1251–1265, https://doi.org/10.1177/09596518231153446, 2023. a
Xing, Z. and Yong, H.: Dynamic analysis and active control of hard-magnetic soft materials, International Journal of Smart and Nano Materials, 12, 429–449, https://doi.org/10.1080/19475411.2021.1961909, 2021. a, b
Xu, F., Ma, K., Jiang, Q., and Jiang, G.-P.: Kinematic modelling and experimental testing of a particle-jamming soft robot based on a DEM-FEM coupling method, Bioinspir. Biomim., 18, 046018, https://doi.org/10.1088/1748-3190/acdc73, 2023. a
Xu, F., Kang, X., and Wang, H.: Hybrid visual servoing control of a soft robot with compliant obstacle avoidance, IEEE-ASME T. Mech., 29, 4446–4455, https://doi.org/10.1109/TMECH.2024.3377632, 2024. a, b
Xu, N. W., Townsend, J. P., Costello, J. H., Colin, S. P., Gemmell, B. J., and Dabiri, J. O.: Field testing of biohybrid robotic jellyfish to demonstrate enhanced swimming speeds, Biomimetics, 5, 64, https://doi.org/10.3390/biomimetics5040064, 2020. a
Xu, Y., Li, H., Li, H., Fang, G., and Jia, H.: Path planning and intelligent control of a soft robot arm based on gas-structure coupling actuators, Frontiers in Materials, 9, 1052538, https://doi.org/10.3389/fmats.2022.1052538, 2022. a, b, c
Yang, P., Huang, B., McCoul, D., Xie, D., Li, M., and Zhao, J.: SpringWorm: A soft crawling robot with a large-range omnidirectional deformable rectangular spring for control rod drive mechanism inspection, Soft Robot., 10, 280–291, https://doi.org/10.1089/soro.2021.0127, 2023a. a
Yang, Q. and Liu, Z.: Model-based versus model-free optimal tracking for soft robots: analytical and data-driven Koopman modeling, control design and experimental validation, Nonlinear Dynam., 112, 15267–15287, https://doi.org/10.1007/s11071-024-09851-x, 2024. a, b
Yang, Y., Han, J., Liu, Z., Zhao, Z., and Hong, K.-S.: Modeling and adaptive neural network control for a soft robotic arm with prescribed motion constraints, IEEE/CAA Journal of Automatica Sinica, 10, 501–511, https://doi.org/10.1109/JAS.2023.123213, 2023b. a, b, c
Zhang, A., Truby, R. L., Chin, L., Li, S., and Rus, D.: Vision-based sensing for electrically-driven soft actuators, IEEE Robotics and Automation Letters, 7, 11509–11516, https://doi.org/10.1109/LRA.2022.3201604, 2022. a
Zhang, H., Heung, K. H., Naquila, G. J., Hingwe, A., and Deshpande, A. D.: A Novel Parameter Estimation Method for Pneumatic Soft Hand Control Applying Logarithmic Decrement for Pseudo-Rigid Body Modeling, Advanced Intelligent Systems, 7, 2400637, https://doi.org/10.1002/aisy.202400637, 2025. a
Zhang, J., Chen, X., Stegagno, P., Zhou, M., and Yuan, C.: Learning-based tracking control of soft robots, IEEE Robotics and Automation Letters, 8, 6155–6162, https://doi.org/10.1109/LRA.2023.3303724, 2023. a
Zhang, J., Chen, Y., and Gong, Y.: Kinematics, dynamics, and control of underwater robotic snake based on a rigid-soft unified model, Ships Offshore Struc., 19, 1408–1423, https://doi.org/10.1080/17445302.2023.2247131, 2024a. a
Zhang, L., Xu, Q., and Liu, J.: Dynamic modeling for continuous locomotion of bionic soft worm-like robot, Int. J. Non-Lin. Mech., 162, 104702, https://doi.org/10.1016/j.ijnonlinmec.2024.104702, 2024b. a
Zhang, S., Shan, J., Fang, B., and Sun, F.: Soft robotic finger embedded with visual sensor for bending perception, Robotica, 39, 378–390, https://doi.org/10.1017/S0263574720000429, 2021a. a
Zhang, Y., Yang, D., Yan, P., Zhou, P., Zou, J., and Gu, G.: Inchworm inspired multimodal soft robots with crawling, climbing, and transitioning locomotion, IEEE T. Robot., 38, 1806–1819, https://doi.org/10.1109/TRO.2021.3115257, 2021b. a
Zhao, P., Liu, J., Wu, C., Zhao, Y., Yu, S., and Jing, X.: Theoretical modelling and sensitivity analysis for triangular membrane wrinkling of solar sail under muti-field effects, Appl. Math. Model., 116646, https://doi.org/10.1016/j.apm.2025.116646, 2025. a
Zhao, Y., Xi, F., Hao, G., Tian, Y., Li, L., and Wang, J.: Kineto-static analysis of a hybrid manipulator consisting of rigid and flexible limbs with locking function for planar shape morphing, Mech. Mach. Theory, 203, 105802, https://doi.org/10.1016/j.mechmachtheory.2024.105802, 2024. a
Zhou, X., Wu, C., Cai, S., and Bao, G.: A Pneumatic-Actuated Flexible Robotic Arm With Rigid Backbone for High-Precision and Safe Manipulation, IEEE-ASME T. Mech., https://doi.org/10.1109/TMECH.2024.3392828, 2024. a